






















47
■ Operate with KRC Commander
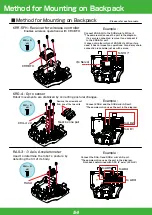
1. Click KRC Commander from the Win-
dows menu and open the KRC Command-
er window.
The KRC Commander screen opens. Motions can be assigned to each button
and operated. Refer to the sample motion assignment list at the end of this
section.
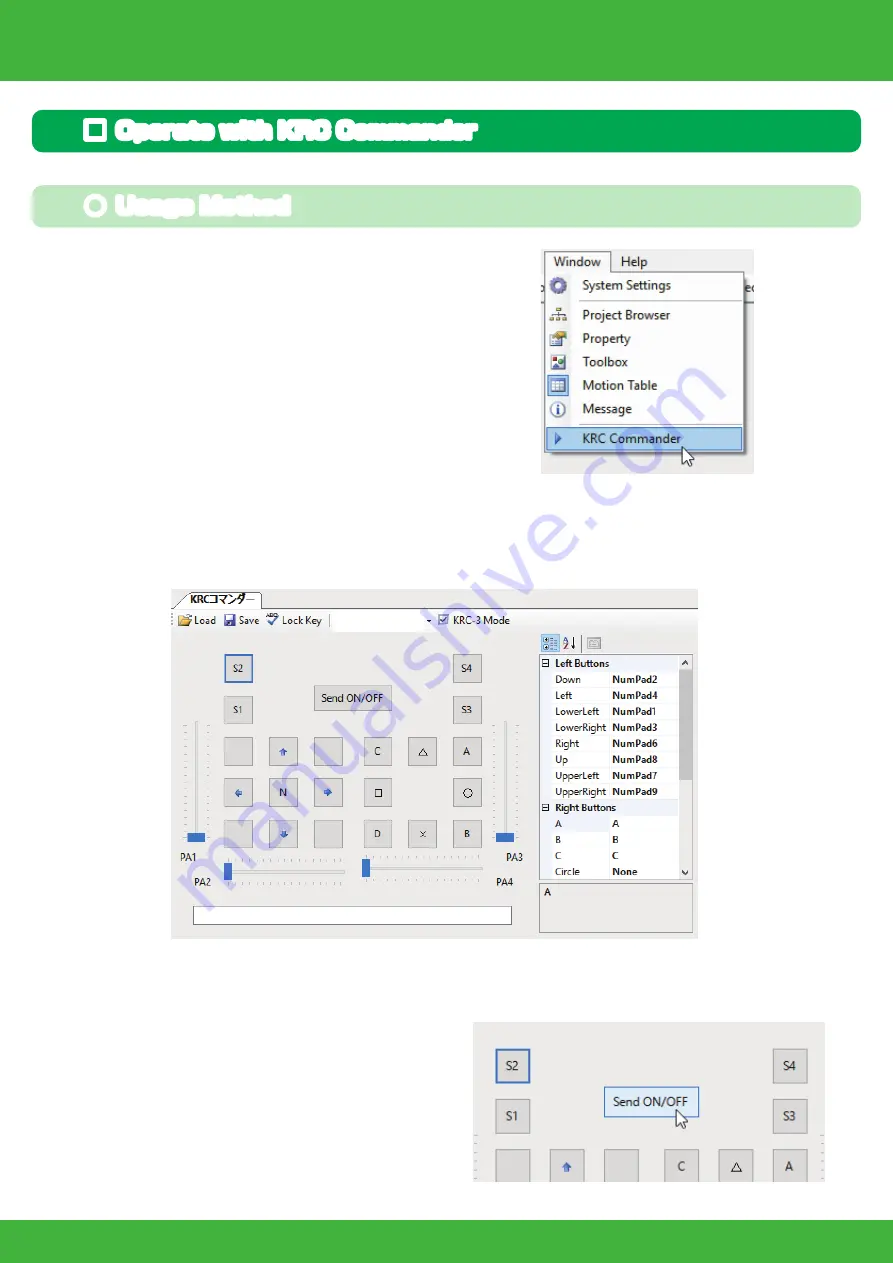
2. Click the Send ON/OFF button to
start communications with the robot.
● Usage Method
Running Sample Motions 3
Summary of Contents for KXR-L6
Page 56: ......







































































