




























26
Body Assembly 2
Joining
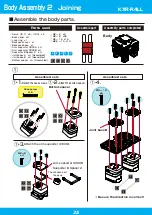
M2 ー 8
x8
②
②-1.
②-3.
②-2.
Rotate until it clicks into place.
M2 ー 6
x2
Body panel
Joint base A
Assenble 2 sets
*Assemble by wiring
through the Body panel
and Backpack base.
●
Leg plate
●
Lock ring
●
Back pack
●
BT Box side
●
Body part top side
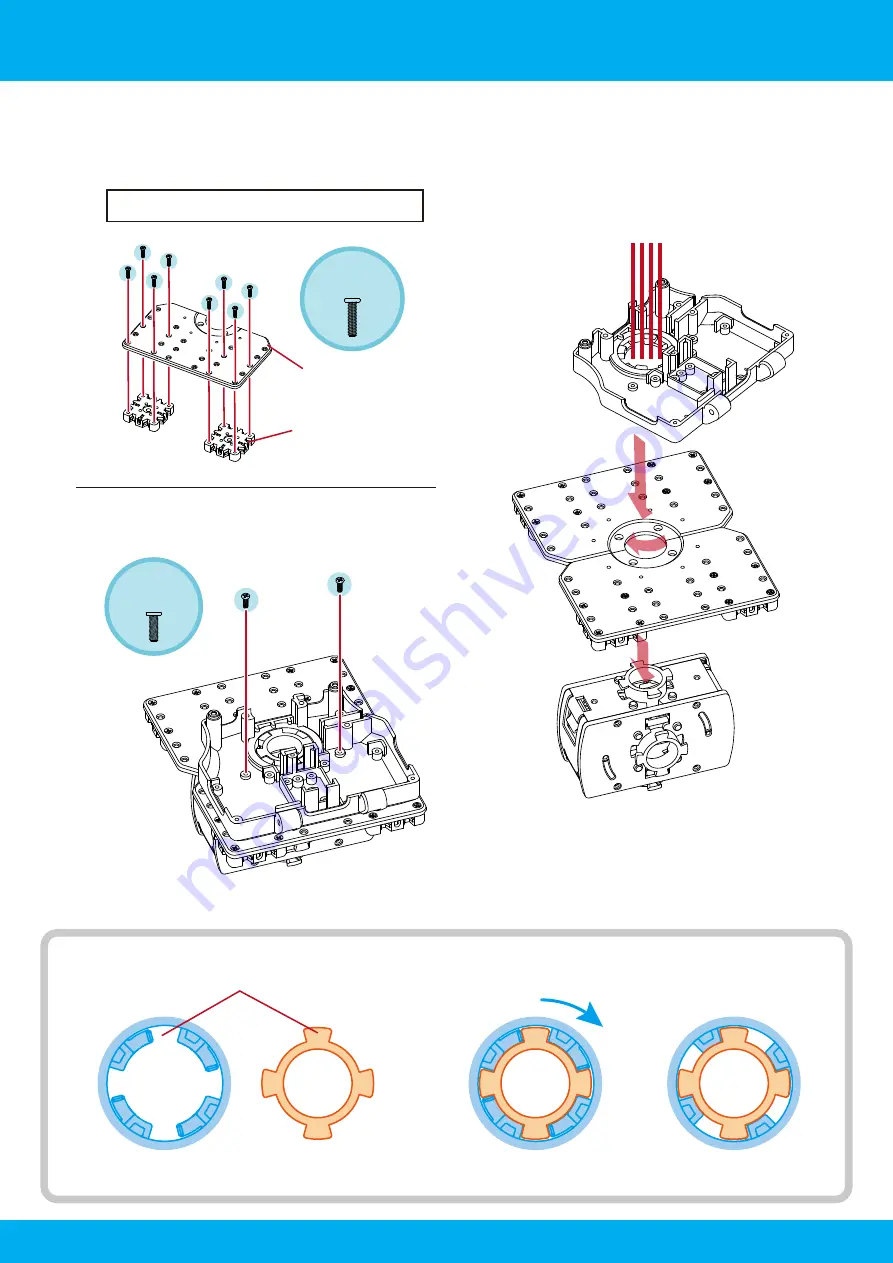
Lock
①Align the notch and protrusion, and attach.
②Rotate until it clicks into place.
About the lock portion for the BT box and body parts
KXR-R4LL







































































