












INSTALLATION MANUAL
20221594 / B
13
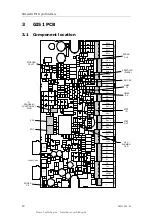
3.2
Terminal description
TB1, Power
PW
R
-
+
Used for power connection when GI51 is not powered by
Robnet.
When power is connected to TB1 in a Robnet system, GI51 will
continue to output gyro heading even if the autopilot is turned
OFF.
TB2, Sin/Cos Out
V/2
Cos
APGND
Sin
AP+
SI
N/
CO
S
Used for heading output to certain models of Simrad autopilots
(AP200 series, AP45, AP9).
TB3, Synchro In
R2
SYNC
HRO
S2
S3
S1
R1
Used for connecting gyro compasses with synchro output. Refer
Dip switch settings
, page
7
for signal specification.
TB4, NFU
Enable
Port
Stbd
+12V
NF
U
Used for connecting a remote Non Follow Up lever. Rudder
command or course change will be sent to the autopilot via
Robnet.
Simrad S9 lever also enables remote auto/NFU mode switching.
TB5, Step Out
Step 2
Step 3
Step 1
STEP OU
T
Com
Used for operating heading repeaters with step input.
Note!
Step signals only for electronic interface, not for step motors!
See TECHNICAL SPECIFICATIONS, page 20.
Busse-Yachtshop.de info@busse-yachtshop.de