



















5
teillastfest, solange bei Vollgas und
Volllast der
Akkustrom die zulässige
Dauerstromgrenze nicht
ü
berschreitet.
4.7 Sensorlose Kommutierung
Der JIVE Pro benötigt keine Sensoren im
Motor,
er arbeitet mit einem 3D K
ennfeld. Die
Anpassung
an
den
Motor
und
den
Betriebszustand erfolgt
automatisch und ist somit
dynamisch.
4.8 Variable Taktfrequenz
Der JIVE Pro verwendet eine Taktfrequenz von
32 kHz oder höher. Je nach Anforderung
wird sie
automatisch angepasst. Die Höhe der
Takt-
frequenz ist abhängig vom verwendeten
Motor
und
der
momentanen
Belastung.
Die
Taktfrequenz wird optimal auf die anliegenden
Parameter abgestimmt.
Der Motor arbeitet somit
i
mmer im Bereich des optimalen Wirkungsgrades.
4.9 Schutzmechanismen
Im JIVE Pro sind folgende
Schutzmechanismen
aktiviert:
12.
Wird länger als 2 s kein
gültiges Empfangs-
signal erkannt, schaltet der Regler den Motor
ab. Der Wert kann per Programmiereinheit
von 1–4 s eingestellt
werden.
• Bei Übertemperatur wird das Gas langsam
(ca. 60 s) auf null zurückgeregelt.
• die Unterspannungserkennung führt in
Modus 1 und 2 (APM und Segler) zur
Abschaltung un
d in Modus 3 bis 6
(Motorflug, Heli, RC Car) zu einer langsamen
Abregelung.
Wenn der JIVE Pro die Drehzahl im Heli
Modus herunter geregelt hat, ist kein
d
irektes Hochfahren mehr möglich. Erst
nach Anstecken eines g
eladenen Akkus
wird der Betrieb wieder fr
eigegeben.
4.10 Heli Modus
Im Heli Modus ist die Drehzahlregelung aktiv.
Die Motordrehzahl wird konstant gehalten. Last-
schwankungen und das Absinken der A
kkuspan-
nung werden kompensiert, solange
die Leistung
des Akkus und des Motors dafür ausreichen. Es
wird kein separater
Mischer der Fernsteuerung
benötigt, um die
Rotordrehzahl zu stabilisieren.
Die Drehzahlregelung funktioniert nur im
eingebauten Zustand. Wird der Motor ohne
die Schwungmasse des Rotors betrieben,
kann ein ruckender Betrieb
entstehen.
Empfehlenswert ist, beim Hochlaufen immer auf
0° Pitch zu stellen, damit die
Drehzahl bei jedem
Flug annähernd gleich is
t.
Zum Starten des Motors den zuvor festgelegten
Schalter
(siehe Punkt 3.1) auf die Idle 1 Position
stellen. Mittels Sanftanlauf erhöht der Regler
innerhalb der eingestellten Hochlaufzeit
die
Motordrehzahl
(Einstellung siehe 3.3).
Wenn die vorher eingestellte
Motordrehzahl
erreicht ist, schaltet der Regler
automatisch auf
Regelbetrieb. Je höher die im Sender hinterlegte
Prozentzahl für den
Flugzustand (siehe 3.1), desto
höher ist die eingeregelte Drehzahl.
Wird die Gasvorwahl am Sender auf
Motor-Aus
Stellung zurückgestellt, schaltet der
Motor aus. Die
Motor-Aus Stellung sollte
während des Fluges nicht
angewählt werden, da zum Wiederanfahren des
Motors durch den Sanftanlauf die eingestellte
Hochlaufzeit (siehe Punkt 3.3) benötigt wird.
Eine Ausnahme stellt der Modus 4 mit Autorotation
dar, da beim Zurückschalten von Autorotation auf
Normalbetrieb der Rotor per Schnellanlauf
beschleunigt wird.
4.11 Auto Rotation (Bail-out)
Durch die
Autorotations-Schnellanlauf-Funktion
läuft der Motor in
deutlich kürzerer Zeit wieder an
und bringt den
Rotor schneller auf Drehzahl.
Dadurch sind
abrupte Abfangmanöver möglich.
Die Hochlaufzeit nach Bail-out ist dabei von der
eingestellten Hochlaufzeit abhängig. Sie wird
automatisch errechnet und liegt bei 2 - 6 s.
Die AR Position ist zuvor am Sender bei 25 %
einzustellen
(siehe 3.1) und muss nicht separat am
JIVE Pro programmiert werden (siehe Abb. in 7.4).
Bei Anwahl der definierten AR Position im l
au-
fenden Betrieb wird der Motor
abgeschaltet und die
AR Funktion ist aktiviert. Wird die AR Funktion
durch Idle 1, Idle 2, Idle x
beendet, schaltet der
Motor wieder ein und die Drehzahl wird im
Schnellanlauf auf den vorher eingestellten Wert
h
ochgefahren.
Wird die aktive
AR Funktion abgebrochen und der
Motor ausgeschaltet, aktiviert der JIVE Pro beim
anschließenden Motorstart den r
egulären Sanft-
anlauf.
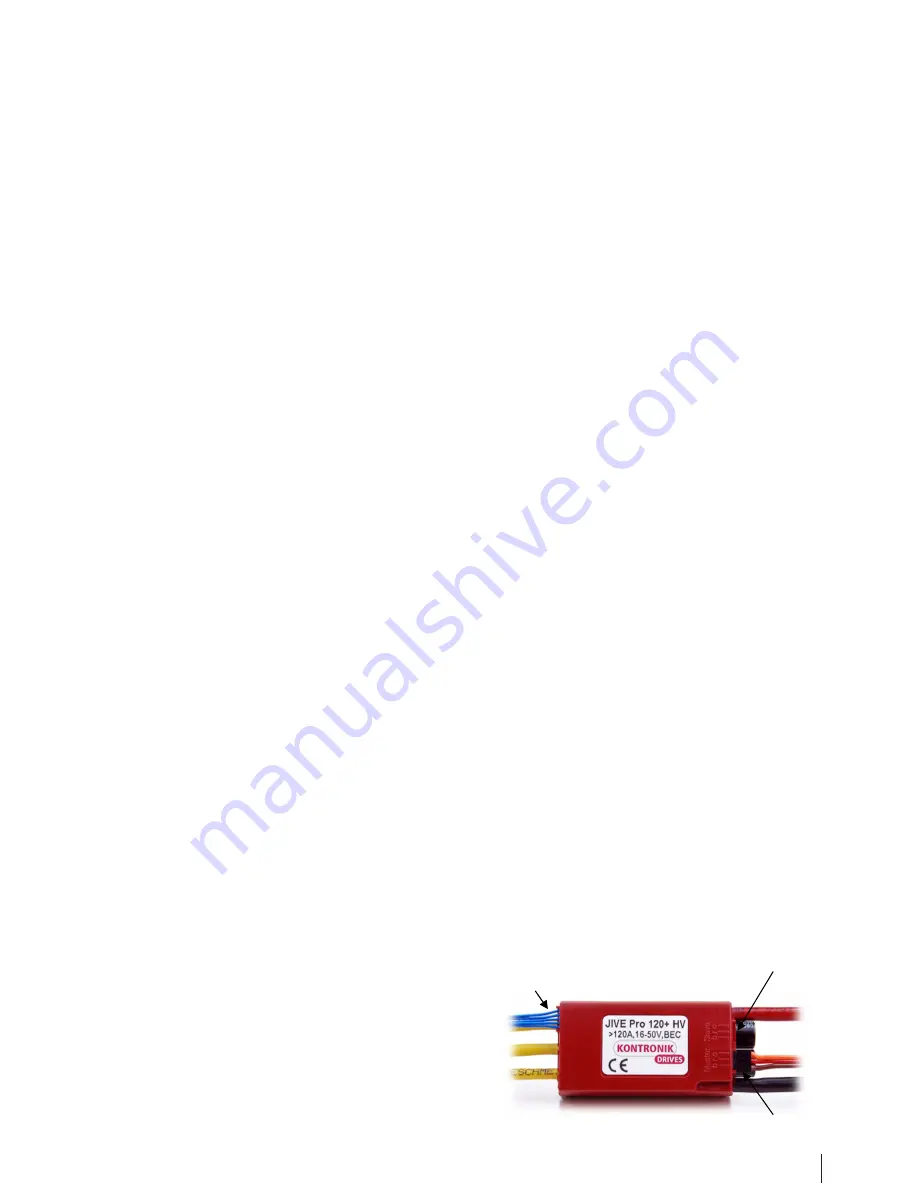
5. Anschluss der Kabe
l
ACHTUNG: Die Montage muss immer
stromlos (kein angeschlossener Akku)
erfolgen.
!
!
!
Jumperkabel
Empfänger (beliebiger
Steckplatz)
Empfänger (Kanal
mit Gasfunktion)







































































