





























5-34
5-8-4
P-I-D control terms
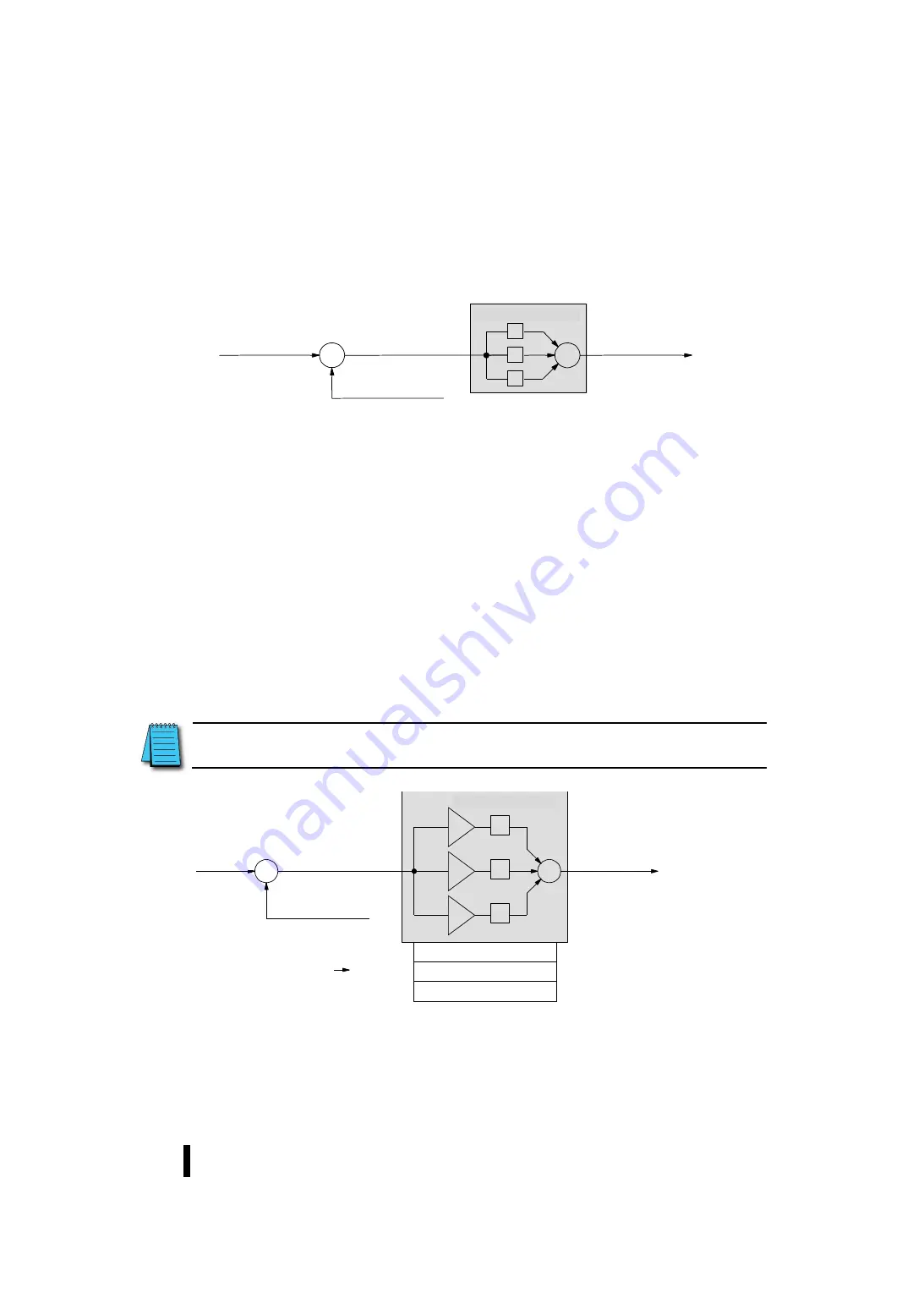
The PID control equation has a position format and a velocity format. Equations are essentially three components of the PID
operation. The figure below provides an overview of the PID operation. The control output is the sum of the proportional,
integral, and differential terms. For each operation of the control, each term receives the same deviation signal value.
The roles of the P, I, and D terms in the control task are as follows:
Proportional(P): The proportional term is simply proportional to the magnitude of the current deviation. This
controller computes the value of the proportional term for each PID operation. When the deviation is zero, the
proportional term is zero.
Integration (I): The integral term integrates (adds) the deviation value. In automatic mode, the PID operation is
started first, but the integrator has the sum of the deviation values for each operation. In the position form of the
PID equation, when the control reaches stability and the deviation is gone, the integrator has the constant output
required to hold the present position of the PV.
Differential(D): The derivative term depends on the current deviation from the error value used in the previous
PID operation. The work of the derivative is to anticipate an increase in the deviation and to reflect it in the
output in advance.
The P, I, and D terms work together as a team. Several additional instructions are required to make PID operations effective.
The figure below shows that the P, I, and D terms contain programmable gain values kp, ki, and kd, respectively. These values
are in the control table. The goal of the PID control tuning process (discussed later) is to derive gain values that provide overall
good control performance.
Note: In PID control terms, proportional gain is sometimes referred to simply as "gain."
+
-
+
P
I
D
+
+
偏差
セットポイント
ループ演算
プロセス変数
制御出力
+
–
+
P
I
D
+
+
k
p
k
i
k
d
R+10
XX.XX
R+11
XX.XX
R+12
XX.XX
偏差
セットポイント
ループ演算
プロセス変数
制御出力
比例ゲイン
積分ゲイン
微分ゲイン
ループテーブル
Loop calculation
Control
output
Set point
Process variable
Deviation
Loop calculation
Control
output
Set point
Process variable
Deviation
Loop table
Proportional gain
Integral gain
Differential gain
Summary of Contents for Kostac SJ-Ether Series
Page 1: ...English version of the KOSTAC SJ Ether series user s manual SJ ETHER USER M...
Page 12: ......
Page 13: ...1...
Page 14: ......
Page 88: ......
Page 89: ......
Page 113: ...3 24 Note Refer to 6 3 3 Module Assembly for connections and locks between modules...
Page 153: ......
Page 156: ...flashing OFF Not sent H W RX Green flashing Receiving H W OFF Not received H W...
Page 161: ...4 8...
Page 221: ......
Page 310: ...Chapter 7 Maintenance...
Page 311: ......







































































