





























5-36
5-8-5
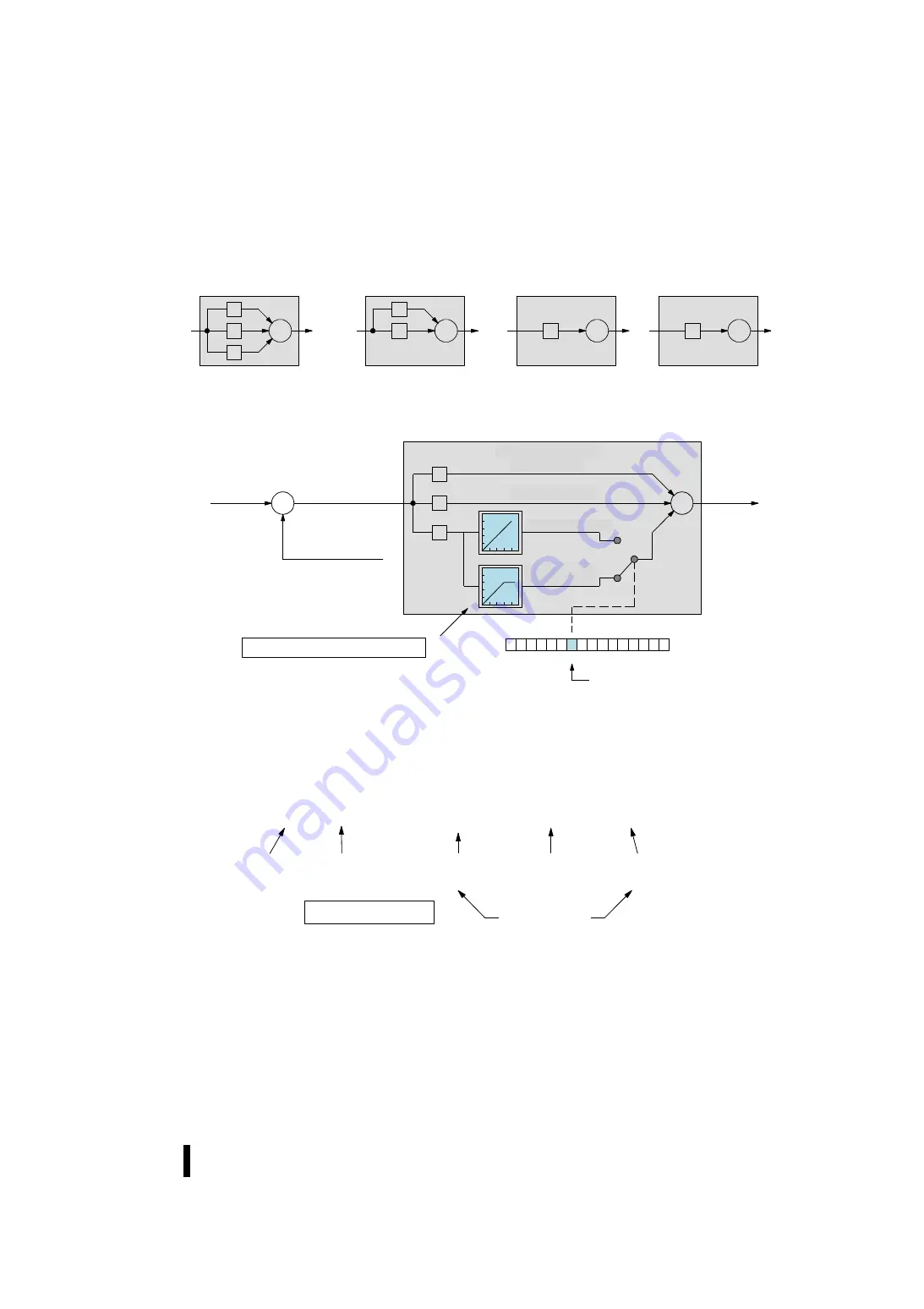
Use part of PID control
Each P, I, and D gain can be removed from the PID equation. Many applications work best by using part of PID control. The
figure below shows various combinations of PID control provided by the SJ-Ether. There are various applications, so select the
appropriate combination.
5-8-6
Differentiating filter
This function allows you to filter only the differential terms. Differential terms are optional because they are susceptible to other
disturbances, such as PV signal noise or sudden PV variation. The function of the differential filter is shown in the figure below.
Use bit 9 of PID mode setting 1 R + 00 to select whether or not there is a differential filter.
The differential filter is located at R+25 and ranges from 0 to 20 in BCD format. This setting is enabled only when bit 9=1. The
differential filter limit is used for tuning.
5-8-7
Bias value
In a position format that is widely used in the PID equation, one of the important components of the control output value is a
bias condition. The bias value is in R+04 of the control table. The control controller writes a new bias value after each PID
control.
If the deviation (en) is zero at two or more sample rates, the proportional and differential terms are removed. The bias value is
the sum of the integral term and the initial output (Mo). This represents a stable constant of the control output value. This is
similar to the DC component of a complex signal waveform.
The bias value creates an "effective range" for the control output. When the deviation varies around its zero point, the output
varies around the bias value. This concept is very important. Because it is the reason to slow the response to the error of the
integral term relative to the proportional or differential term.
5-8-8
Fixation of bias
The "reset windup" condition may cause a significant overshoot due to integrating operation. This is illustrated in the following
M
n
=
K
c
*
e
n
+
K
i
*
e
i
+ K
r
* (e
n
– e
n
–1
) + M
o
i=1
n
V+04
XXXX
制御出力
比例項
積分項
微分項
初期出力
バイアス値
バイアス値
R+25
+
P
I
D
+
+
+
P
I
+
P
+
I
+
+
?
0
1
3
4
5
6
7
8
9
10
11
12
13
14
15
2
+
P
I
D
+
+
0
1
V+25
00XX
偏差
セットポイント
ループ演算
プロセス変数
制御出力
比例
積分
微分
微分フィルタ
ループテーブル
微分フィルタ
PID
モード
1
設定ワード:
R
+
00
微分フィルタの選択
ビット
R+25
Loop calculation
Control
output
Bit
PID mode 1 setting word
Set point
Process variable
Deviation
Loop table
Proportional
Integral gain
Differential gain
Differential filter
Differential
filter
Selection of Differential filter
Control output
Proportional term
Integral term
Differential term
Initial output
Bias value
Bias value
Summary of Contents for Kostac SJ-Ether Series
Page 1: ...English version of the KOSTAC SJ Ether series user s manual SJ ETHER USER M...
Page 12: ......
Page 13: ...1...
Page 14: ......
Page 88: ......
Page 89: ......
Page 113: ...3 24 Note Refer to 6 3 3 Module Assembly for connections and locks between modules...
Page 153: ......
Page 156: ...flashing OFF Not sent H W RX Green flashing Receiving H W OFF Not received H W...
Page 161: ...4 8...
Page 221: ......
Page 310: ...Chapter 7 Maintenance...
Page 311: ......







































































