





























5-50
5-12
Cascade control
5-12-1
Introduction
Initially, cascade control is an excellent control technology for controlling a particular situation. As the name implies, the
cascade means that one control is connected to another control. In addition to the manual (open-loop) and automatic
(closed-loop) modes, the SJ-Ether has cascading modes.
Note: Cascade control is a sophisticated process control technology. Therefore, only experienced process control
engineers should be allowed to use.
The complexity of the manufacturing process and the time difference between the control input and the process variable output
can result in insufficient control of the speed and accuracy even with the adjusted single control. It may be the effect of actuator
operation on a physical property, which ultimately influences process variables measured by different physical properties. By
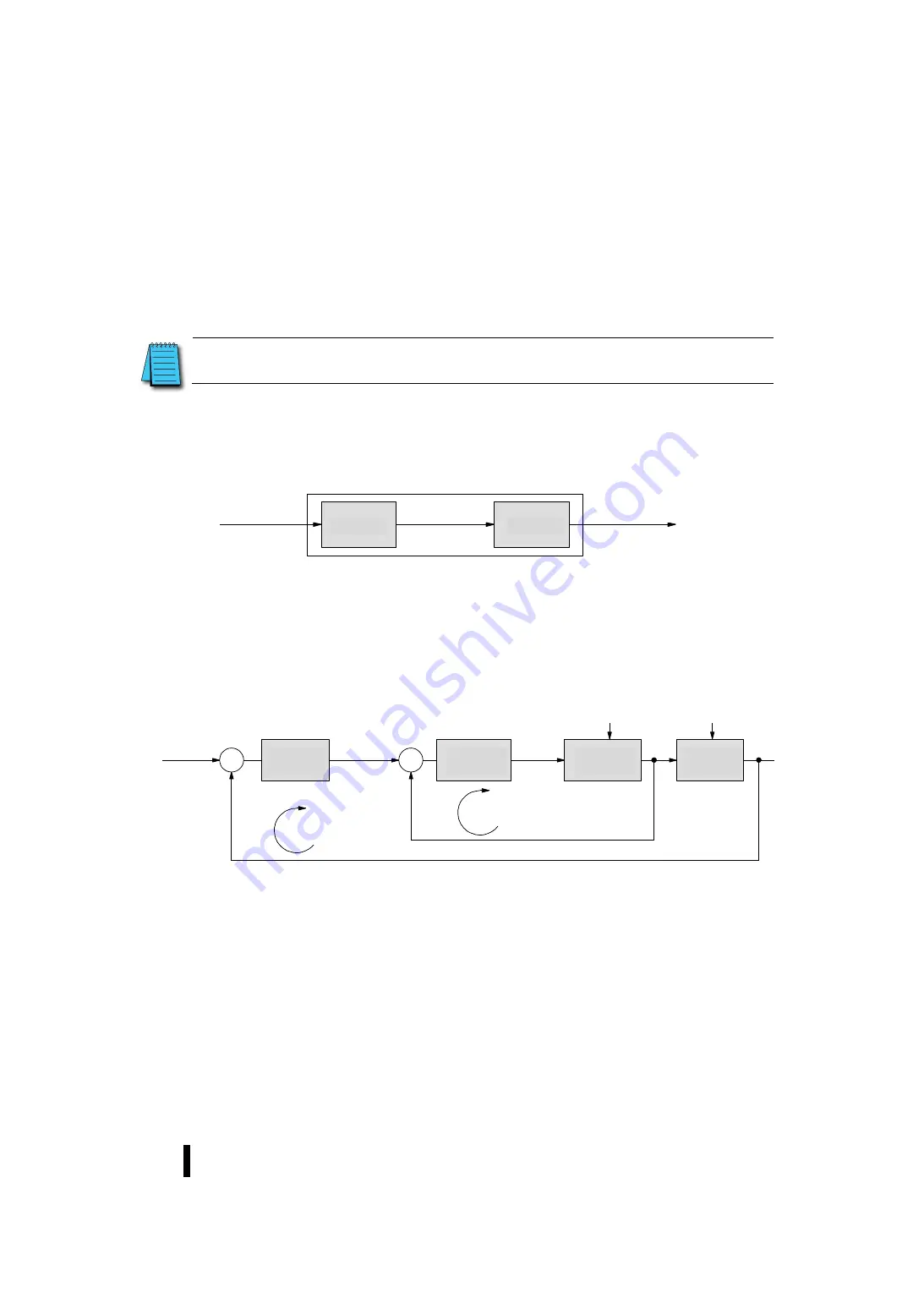
checking the intermediate variables, you can divide the process into two parts, as shown in the figure below.
The principle of cascade control is simply that other process controls can be applied to control intermediate variables more
accurately. This method can also divide the cause of the control delay into two parts.
The following figure shows a cascade control system, which only nests one PID control into another. The inner control is called
the minor loop, and the outer control is called the major loop. For overall stability, the minor loop must respond faster than the
major loop. In addition, the sensor must be added to measure the intermediate variable (PV of process A). Note that the set point
of the minor loop is created automatically by using the output of the major loop. After you have programmed and debugged
cascade control, you just need to process the original set point and process variables at the system level. The cascade control
acts as a single control, but it is better than the single control described above.
By examining the response to disturbances, you can see the advantages of cascade control. As previously described, minor
loops operate faster than major loops. Therefore, if process A of the minor loop is affected by disturbance, the PID operation of
the loop A can correct the possible errors before the major loop is affected.
制御入力
プロセス
プロセス
A
プロセス
B
中間変数
プロセス変数(
PV
)
+
–
+
–
ループ
B
の
演算
ループ
A
の
演算
プロセス
A
(
2
次)
プロセス
B
(
1
次)
出力
B/
セットポイント
A
出力
A
外乱
外乱
メジャー
ループ
PV
、プロセス
A
マイナー
ループ
PV
、プロセス
B
Process
Process A
Process B
Process variable (PV)
Control Input
Middle variable
Calculation
of Loop B
Calculation
of Loop A
Process A
(Secondary)
Process B
(first)
Major
loop
Minor
loop
Output B /
Set point A
Output
A
Disturbance
Environme
ntal effect
Disturbance
PV, Process A
PV, Process B
Summary of Contents for Kostac SJ-Ether Series
Page 1: ...English version of the KOSTAC SJ Ether series user s manual SJ ETHER USER M...
Page 12: ......
Page 13: ...1...
Page 14: ......
Page 88: ......
Page 89: ......
Page 113: ...3 24 Note Refer to 6 3 3 Module Assembly for connections and locks between modules...
Page 153: ......
Page 156: ...flashing OFF Not sent H W RX Green flashing Receiving H W OFF Not received H W...
Page 161: ...4 8...
Page 221: ......
Page 310: ...Chapter 7 Maintenance...
Page 311: ......







































































