




























BCU 560, BCU 565 · Edition 02.16
83
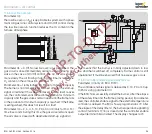
Parameters > Air control > Capacity control
RBW
Parameter 40 = 3: with RBW.
The actuator can be moved to the positions for maximum ca-
pacity (contact COM to HI) and minimum capacity (contact COM
to LO) using the interface and by closing the various contacts.
N
M
R B W
90°
➔
0°
0°
➔
90°
L1
RBW
COM
HI
LO
AUTO
53
54
55
56
52
1
2
3
46
45
65
66
67
68
17
18
37
38
13
14
15
BCU 560..F2
3,15AT
µC
49
50
51
88
c
c
41
42
24V
DC
5 6
9
11 12
10
7
62 61
N
M
+ F -
0°
➔
90°
L1
mA
A D
OUT
+
-
RBW
COM
HI
LO
AUTO
53
54
55
56
52
1
2
3
46
45
17
18
37
38
13
14
15
BCU 560..F2
3,15AT
µC
88
c
c
41
42
24V
DC
5 6
9
11 12
10
7
62 61
65
66
67
68
49
50
51
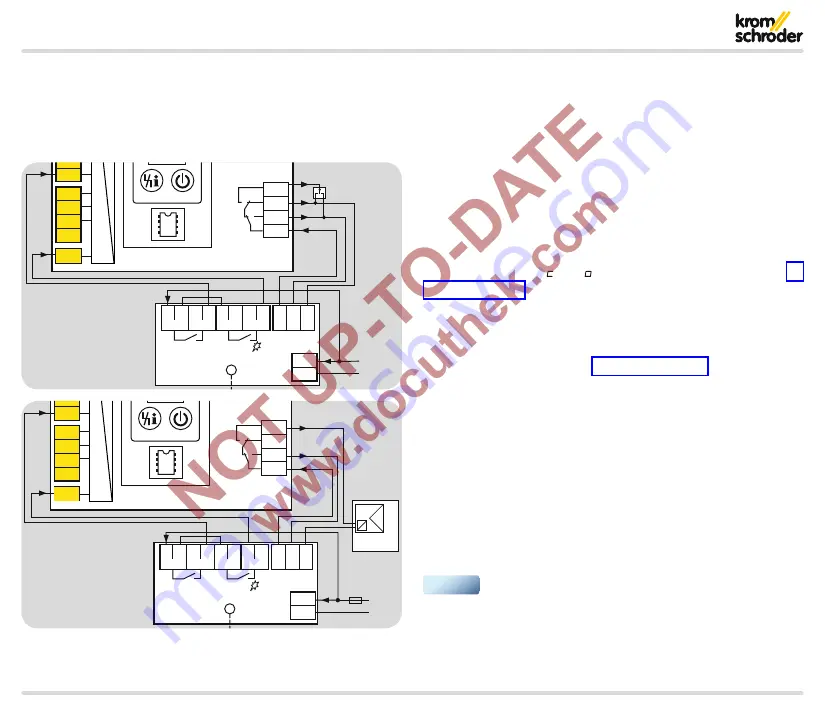
PLC
The RBW actuator reports that it has reached the position for
maximum capacity via a signal to terminal 51. The actuator
reports that it has reached the position for minimum capac-
ity via a signal to terminal 52. The simultaneous activation
of terminals 51 and 52 results in a fault lock-out of the BCU.
If parameter 41 = 0, the system monitors the movement to
the positions for maximum and minimum capacity with a
timeout time of 255 s. Reaching the relevant position imme-
diately triggers the program continue switch conditions. If
reaching the position is not signalled within the timeout time
of 255 s, a safety shut-down of the BCU will be performed.
A fault message (
A
or
A
) will be displayed, see page 50
(Fault signalling).
If parameter 41 = 1, the system does not monitor whether the
positions for minimum and maximum capacity are reached. In
this case, a running time of up to 250 s must be defined using
parameter 42, see page 85 (Running time). The program
continue switch conditions are then controlled dependent on
this time.
If a fault occurs, the actuator is moved to the position for mini-
mum capacity.
Manual mode
In Manual mode, no external controller is enabled during the
controller enable procedure. The actuator can be moved to
the positions for maximum capacity or ignition capacity by
the user. 3-point step operation is not possible. No timeout is
active when approaching these positions.
▼







































































