





























6
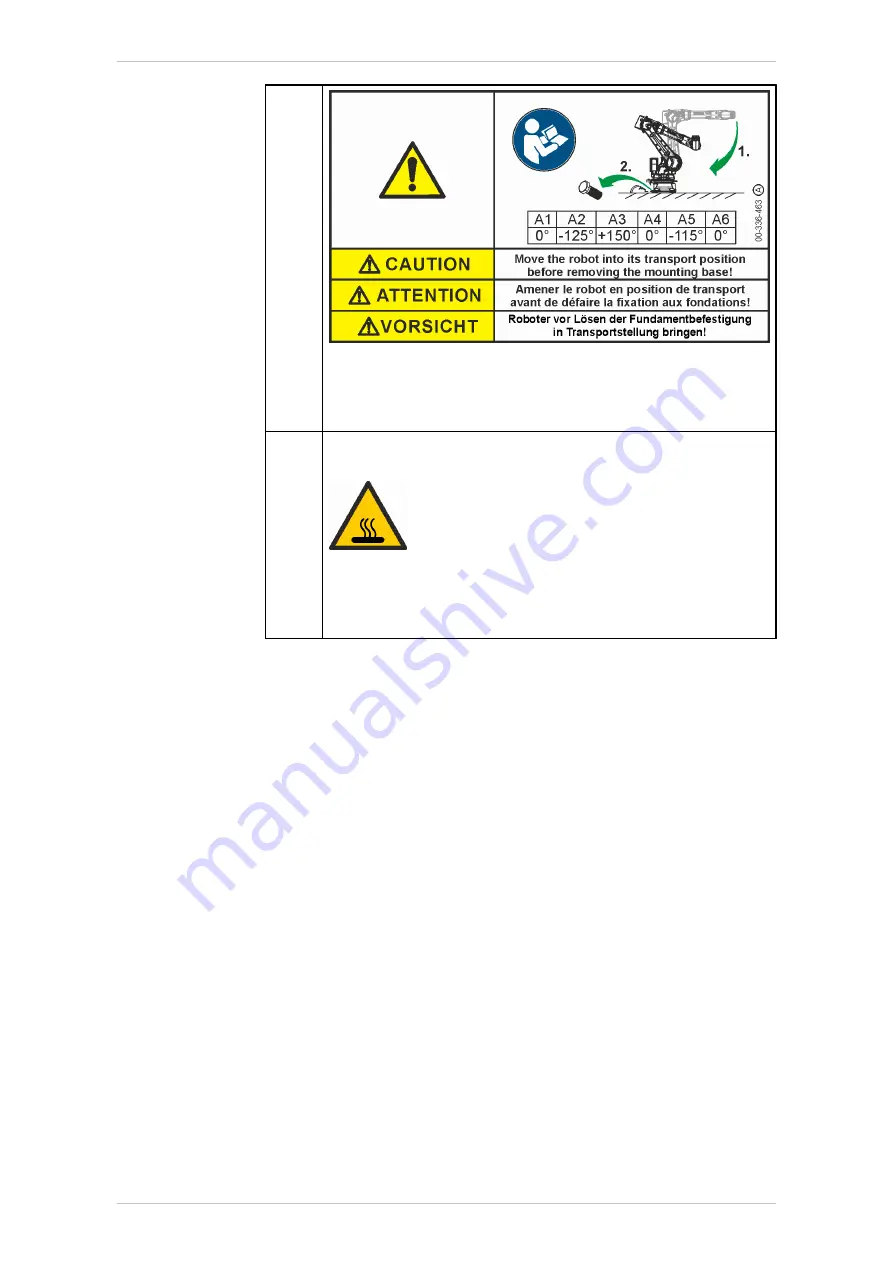
Transport position
Before loosening the bolts of the mounting base, the robot must
be in the transport position as indicated in the table. Risk of
toppling!
-
This plate is attached to all the motors! No other plates or la-
bels may be affixed to the motors!
Hot surface
During operation of the robot, surface temperatures may be
reached that could result in burn injuries. Protective gloves must
be worn!
4.10
REACH duty to communicate information acc. to Art. 33
As of June 2007, the Regulation (EC) 1907/2006 of the European Parlia-
ment and of the Council dated 18 December 2006 on the registration,
evaluation and authorization of chemicals (REACH Regulation) is in force.
Detailed REACH information can be found in the product information in
KUKA Xpert.
4.11
Stopping distances and times
4.11.1
General information
Information concerning the data:
• The stopping distance is the angle traveled by the robot from the mo-
ment the stop signal is triggered until the robot comes to a complete
standstill.
• The stopping time is the time that elapses from the moment the stop
signal is triggered until the robot comes to a complete standstill.
• The data are given for the main axes A1, A2 and A3. The main axes
are the axes with the greatest deflection.
• Superposed axis motions can result in longer stopping distances.
• Stopping distances and stopping times in accordance with DIN EN
ISO 10218-1, Annex B.
• Stop categories:
KR IONTEC
128/344 |
www.kuka.com
MA KR IONTEC V4 | Issued: 11.05.2021
Technical
data
Summary of Contents for IONTEC KR 20 R3100
Page 14: ...KR IONTEC 14 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Introduction...
Page 166: ...KR IONTEC 166 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Planning...
Page 188: ...KR IONTEC 188 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Start up and recommissioning...
Page 310: ...KR IONTEC 310 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Repair...
Page 340: ...KR IONTEC 340 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 KUKA Service...







































































