





























6
Transportation
6.1
Transporting the robot
Description
Move the robot into its transport position each time it is transported. It
must be ensured that the robot is stable while it is being transported. The
robot must remain in its transport position until it has been fastened in po-
sition. Before the robot is lifted, it must be ensured that it is free from ob-
structions. Remove all transport safeguards, such as nails and screws, in
advance. First remove any rust or adhesive on contact surfaces.
Avoid vibrations and impacts during transportation in order to prevent
damage to the manipulator.
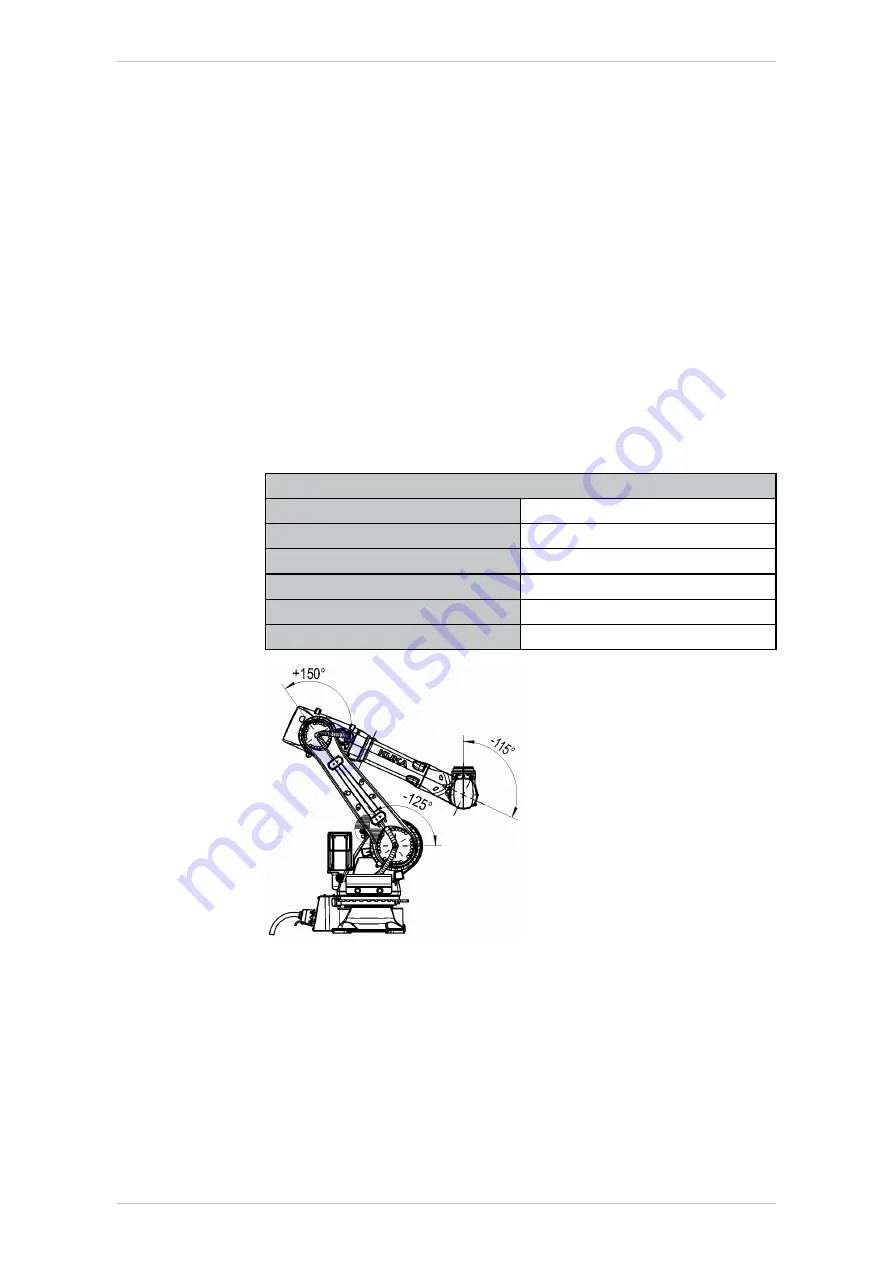
Transport position
The robot must be in the transport position before it can be transported.
The robot is in the transport position when the axes are in the following
positions:
Transport position
A1
0 °
A2
-125 °
A3
150 °
A4
0 °
A5
-115 °
A6
0 °
Fig. 6-1: Transport position
Transport dimensions
The transportation dimensions (
>>>
) for the robot can be noted
from the following diagram. The position of the center of gravity and the
weight vary according to the specific configuration and the position of
axes 2 and 3. The specified dimensions refer to the robot without equip-
ment.
KR IONTEC
MA KR IONTEC V4 | Issued: 11.05.2021
www.kuka.com
| 167/344
T
ransportation
Summary of Contents for IONTEC KR 20 R3100
Page 14: ...KR IONTEC 14 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Introduction...
Page 166: ...KR IONTEC 166 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Planning...
Page 188: ...KR IONTEC 188 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Start up and recommissioning...
Page 310: ...KR IONTEC 310 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Repair...
Page 340: ...KR IONTEC 340 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 KUKA Service...







































































