





























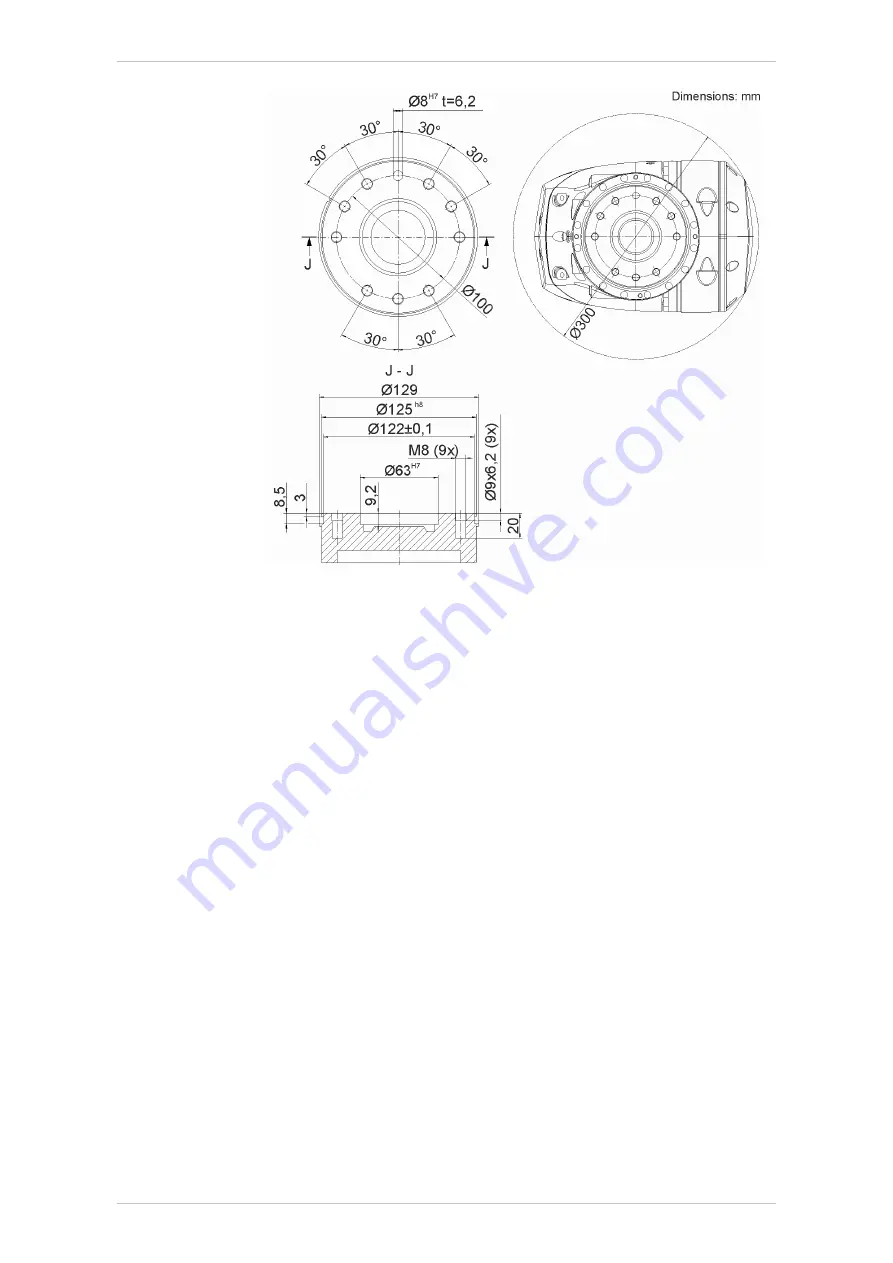
Fig. 4-40: KR IONTEC standard variants, mounting flange D=100
Flange loads
Due to the motion of the payload (e.g. tool) mounted on the robot, forces
and torques act on the mounting flange. These forces and torques depend
on the motion profile as well as the mass, load center of gravity and mass
moment of inertia of the payload.
The specified values refer to nominal payloads and do not include safety
factors. It is imperative for the load data to be entered in the robot control-
ler. The robot controller takes the payload into consideration during path
planning. A reduced payload does not necessarily result in lower forces
and torques.
The values are guide values determined by means of trial and simulation
and refer to the most heavily loaded machine in the robot family. The ac-
tual forces and torques may differ due to internal and external influences
on the mounting flange or a different point of application. It is therefore
advisable to determine the exact forces and torques where necessary on
site under the real conditions of the actual robot application.
The operating values may occur permanently in the normal motion profile.
It is advisable to rate the tool for its fatigue strength.
The EMERGENCY STOP values may arise in the event of an Emergency
Stop situation of the robot. As these should only occur very rarely during
the service life of the robot, a static strength verification is usually suffi-
cient.
KR IONTEC
MA KR IONTEC V4 | Issued: 11.05.2021
www.kuka.com
| 81/344
Technical
data
Summary of Contents for IONTEC KR 20 R3100
Page 14: ...KR IONTEC 14 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Introduction...
Page 166: ...KR IONTEC 166 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Planning...
Page 188: ...KR IONTEC 188 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Start up and recommissioning...
Page 310: ...KR IONTEC 310 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Repair...
Page 340: ...KR IONTEC 340 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 KUKA Service...







































































