




























7.2.4
Connecting the connecting cables
Procedure
1. Fasten the ground conductor between the robot controller and the ro-
bot to the ground conductor connection with 1 M8 hexagon nut includ-
ing conical spring washer; tightening torque M
A
= 15.0 Nm.
2. Optionally, fasten the ground conductor between the system compo-
nent and the robot to the ground conductor connection with 1 M8 hex-
agon nut including conical spring washer; tightening torque
M
A
= 15.0 Nm.
3. Connect motor cable X30 and data cable X31 (
>>>
).
When connecting the motor and data cable connectors, it must be en-
sured that the connectors on the controller and on the robot are
locked correctly.
4. Check the equipotential bonding in accordance with VDE 0100 and
EN 60204-1.
Further information is contained in the operating and assembly in-
structions of the robot controller.
5. Enter the installation position of the robot in WorkVisual. The default
installation position is the floor.
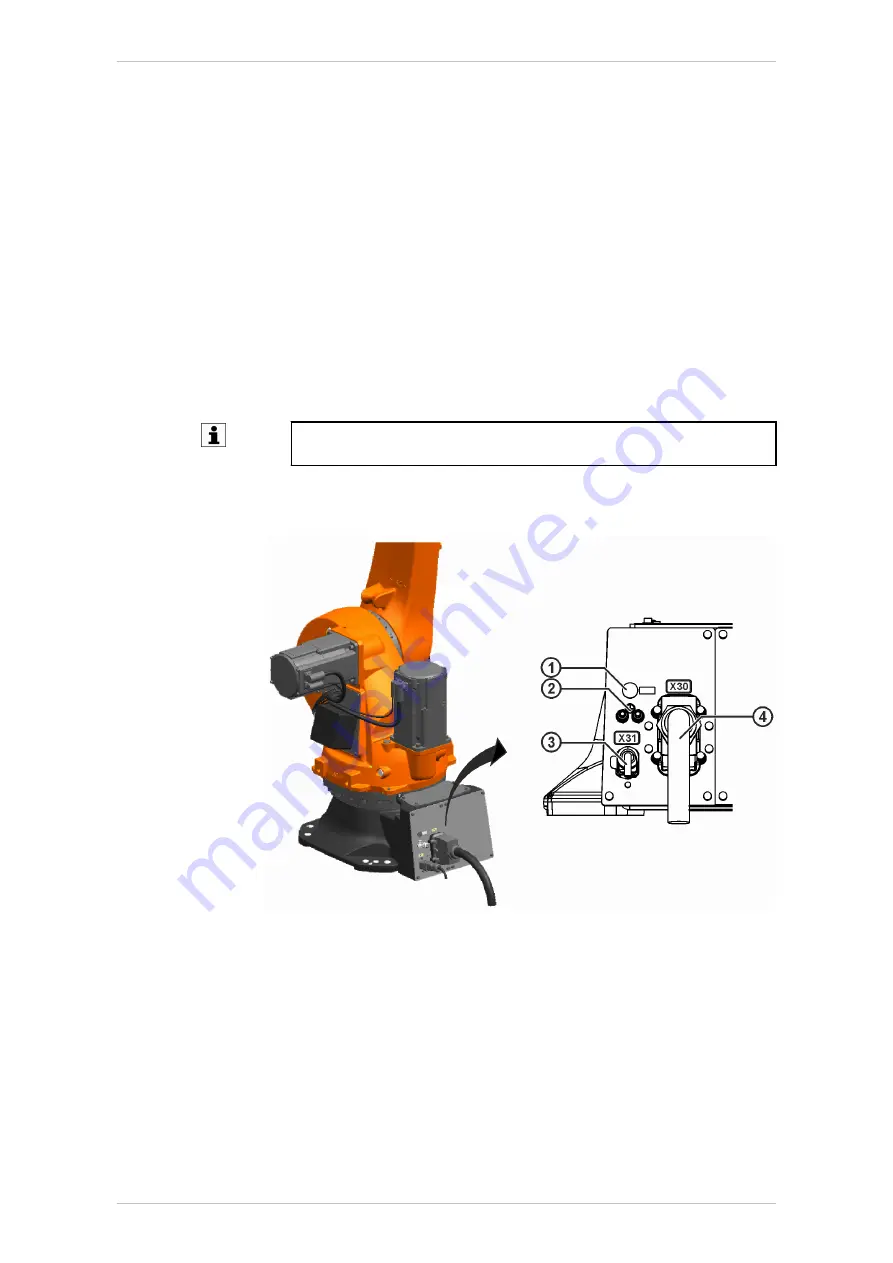
Fig. 7-5: Connecting the connecting cables
1
Connection for sealing air (for Foundry only)
2
Ground conductor (2x)
3
Data cable X31
4
Motor cable X30
7.2.5
Concluding work
The following concluding work must be carried out:
• If applicable, mount the tool.
KR IONTEC
MA KR IONTEC V4 | Issued: 11.05.2021
www.kuka.com
| 177/344
Start-up
and
recommissioning
Summary of Contents for IONTEC KR 20 R3100
Page 14: ...KR IONTEC 14 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Introduction...
Page 166: ...KR IONTEC 166 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Planning...
Page 188: ...KR IONTEC 188 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Start up and recommissioning...
Page 310: ...KR IONTEC 310 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 Repair...
Page 340: ...KR IONTEC 340 344 www kuka com MA KR IONTEC V4 Issued 11 05 2021 KUKA Service...







































































