























Issued: 22.04.2016 Version: Spez KR 20-3 V2
3 Product description
3
Product description
3.1
Overview of the robot system
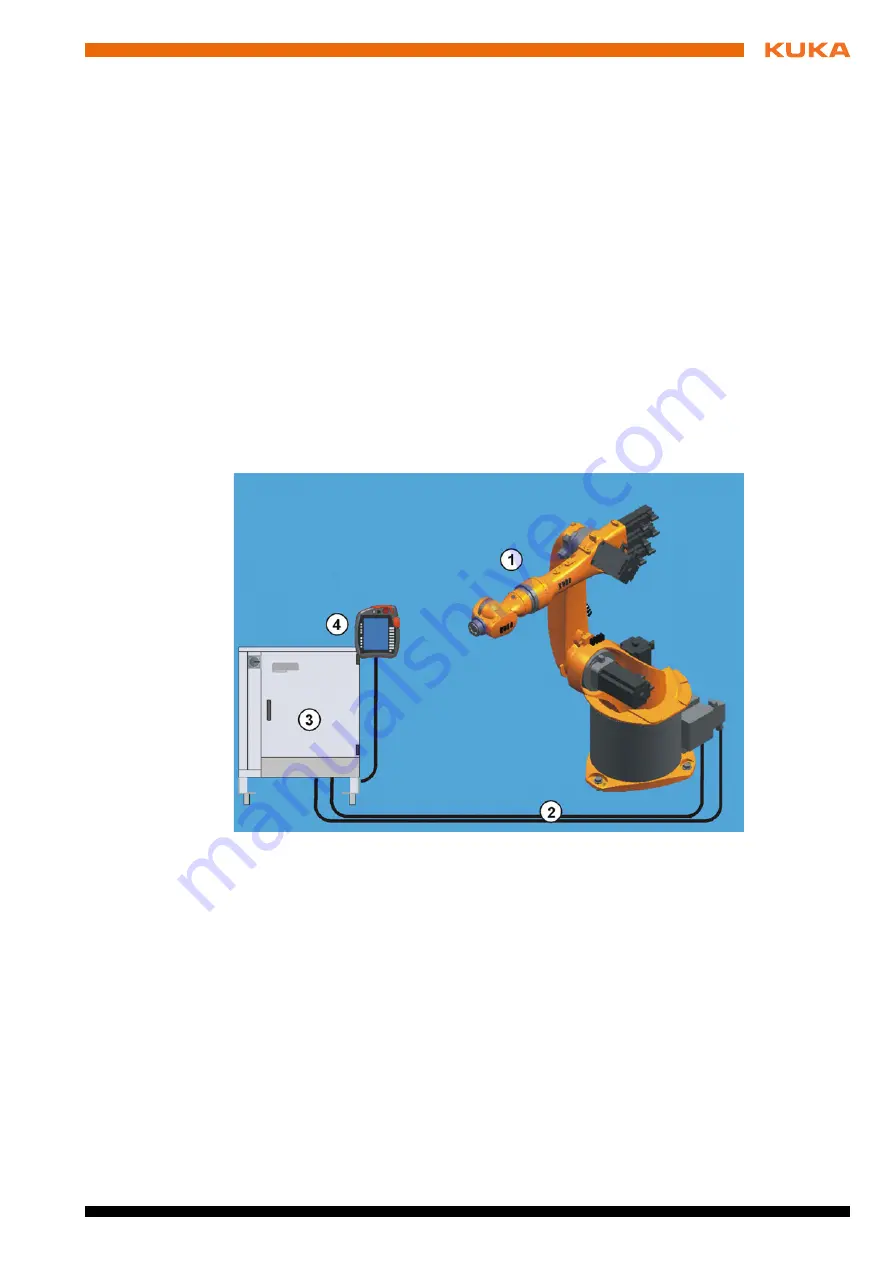
A robot system (
>>>
Fig. 3-1 ) comprises all the assemblies of an industrial
robot, including the manipulator (mechanical system and electrical installa-
tions), control cabinet, connecting cables, end effector (tool) and other equip-
ment. The product family (model) KR 20-3 comprises the robot variants:
KR 20-3
KR 20-3 C
An industrial robot of this product family comprises the following components:
Manipulator
Robot controller
Connecting cables
KCP teach pendant (KUKA smartPAD)
Software
Options, accessories
3.2
Description of the manipulator
Overview
The manipulators (manipulator = robot arm and electrical installations)
(
Fig. 3-2 ) of the KR 20-3 model are designed as 6-axis jointed-arm kine-
matic systems. They consist of the following principal components:
In-line wrist
Arm
Link arm
Rotating column
Base frame
t
s
Fig. 3-1: Example of a robot system
1
Manipulator
3
Robot controller
2
Connecting cables
4
Teach pendant KCP (KUKA
smartPAD)
Summary of Contents for KR 20-3
Page 6: ...6 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 8: ...8 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 12: ...12 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 42: ...42 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 62: ...62 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 68: ...68 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 70: ...70 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 78: ...78 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...
Page 81: ...81 81 Issued 22 04 2016 Version Spez KR 20 3 V2 KR 20 3...



































































