





























56 / 79
Issued: 19.12.2012 Version: KST EthernetKRL 2.2 V1 en (PDF)
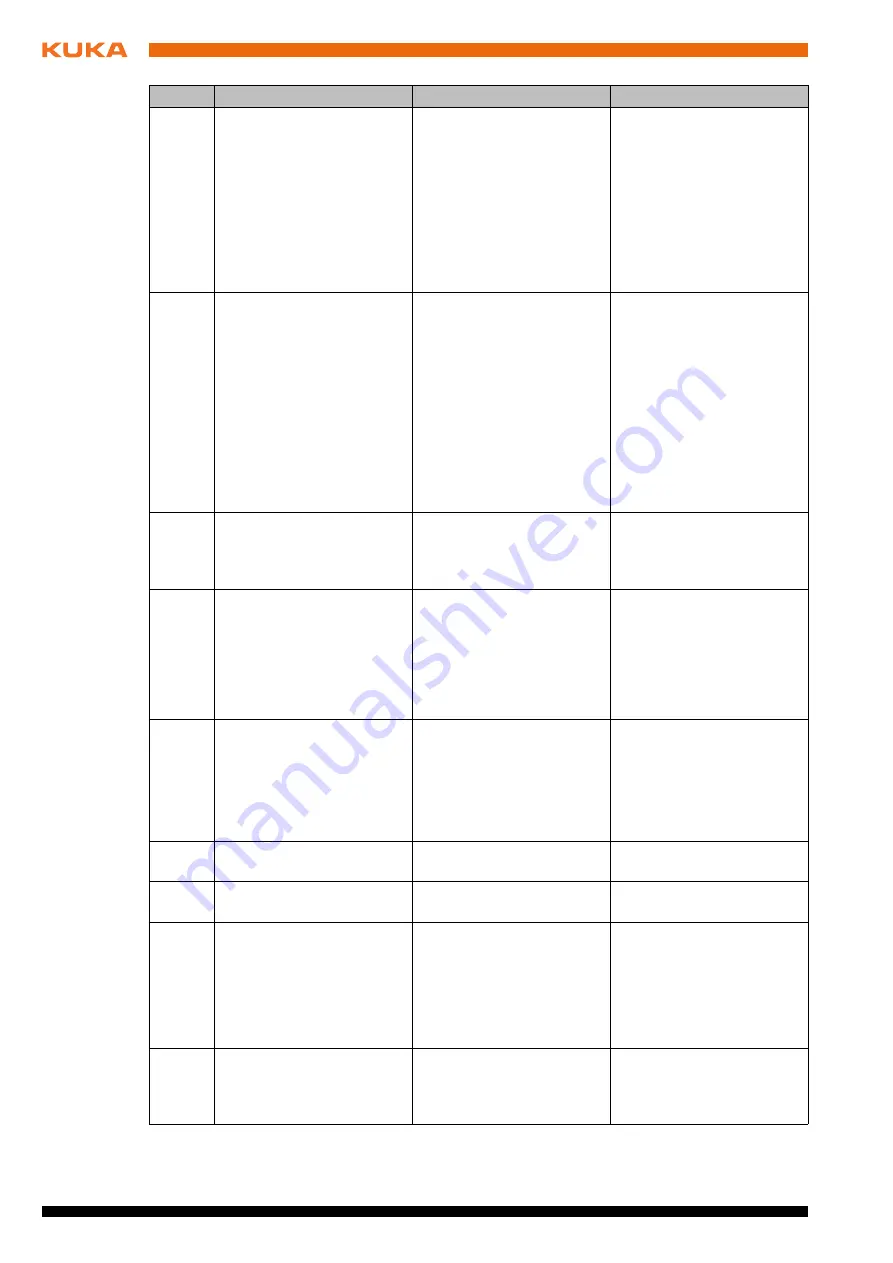
20
Mismatch in type of data
An attempt was made to
read an element which
belongs to a different data
type.
Check the data type of the
element in the configura-
tion of the reception struc-
ture.
OR
Use the data type defined
in the configuration of the
reception structure in the
KRL program.
21
System memory insuffi-
cient with maximum data
storage
It was established that the
system memory is insuffi-
cient when reading in the
configuration.
Check the configuration of
the Ethernet connection
and adjust it so that less
memory is used.
If no other configuration is
possible, the memory can
be increased in consulta-
tion with KUKA Roboter
GmbH.
(
>>>
22
Error while reading the
configuration. XML not
valid.
An error in the XML struc-
ture was detected when
reading in the configura-
tion.
Check the XML structure in
the configuration file.
24
Link to internal parame-
ters (Port, IP) failed
The Ethernet connection,
i.e. the interface, is config-
ured as a server. The IP
address and port number
of the external system
specified in the configura-
tion are not available.
Use the correct IP address
and port number in the
configuration of the con-
nection parameters (IP ele-
ments, PORT).
25
Internal software error
Internal software error
Contact KUKA Roboter
GmbH and submit the log-
book with details on the
error.
(
>>>
26
FRAME array not initialized
An FRAME type array has
not been initialized.
Initialize the FRAME type
array (assign value).
27
CHAR[] Array too small.
A CHAR type array is too
small.
Increase the number of
array elements.
512
Ethernet connection dis-
rupted
No Ethernet connection:
Hardware error, e.g.
network cable, switch,
external system
Software error (exter-
nal system)
Restore the Ethernet con-
nection:
Check hardware.
Check software of ex-
ternal system.
768
Ping reports no contact
The external system no
longer responds to the
ping sent. The connection
is aborted.
Check external system.
No.
Message text
Cause
Remedy
Summary of Contents for KUKA.EthernetKRL 2.2
Page 8: ...8 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...
Page 16: ...16 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...
Page 20: ...20 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...
Page 40: ...40 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...
Page 52: ...52 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...
Page 58: ...58 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...
Page 76: ...76 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...
Page 79: ...79 79 Issued 19 12 2012 Version KST EthernetKRL 2 2 V1 en PDF KUKA EthernetKRL 2 2 ...



































































