








This manual explains how to operate the KT-X bipedal humanoid robot with a PS2 gamepad controller.
Step 1
: Make sure the KT-X battery is fully charged the controller programs have been uploaded into the
robot.
Step 2
: Place the CPU rotary switch to the desired position. Note: only positions with values assigned
during the motion programming phase of the setup will be assigned controller values. For instance, if
you did not assign a routine to CPU rotary switch position “5” and upload it to the robot’s flash memory,
the controller will be inoperative in this position, or the controller will use the previous uploaded
settings to position “5”. This position is empty by default.
Step 3
: Apply power to the robot and press the reset button on the robot’s CPU.
Step 4
: Make sure the robot is in a safe place and will not endanger anything around it when power is
suddenly applied to the servos. You may want to hold the robot by its torso with one hand, and…
Step 5
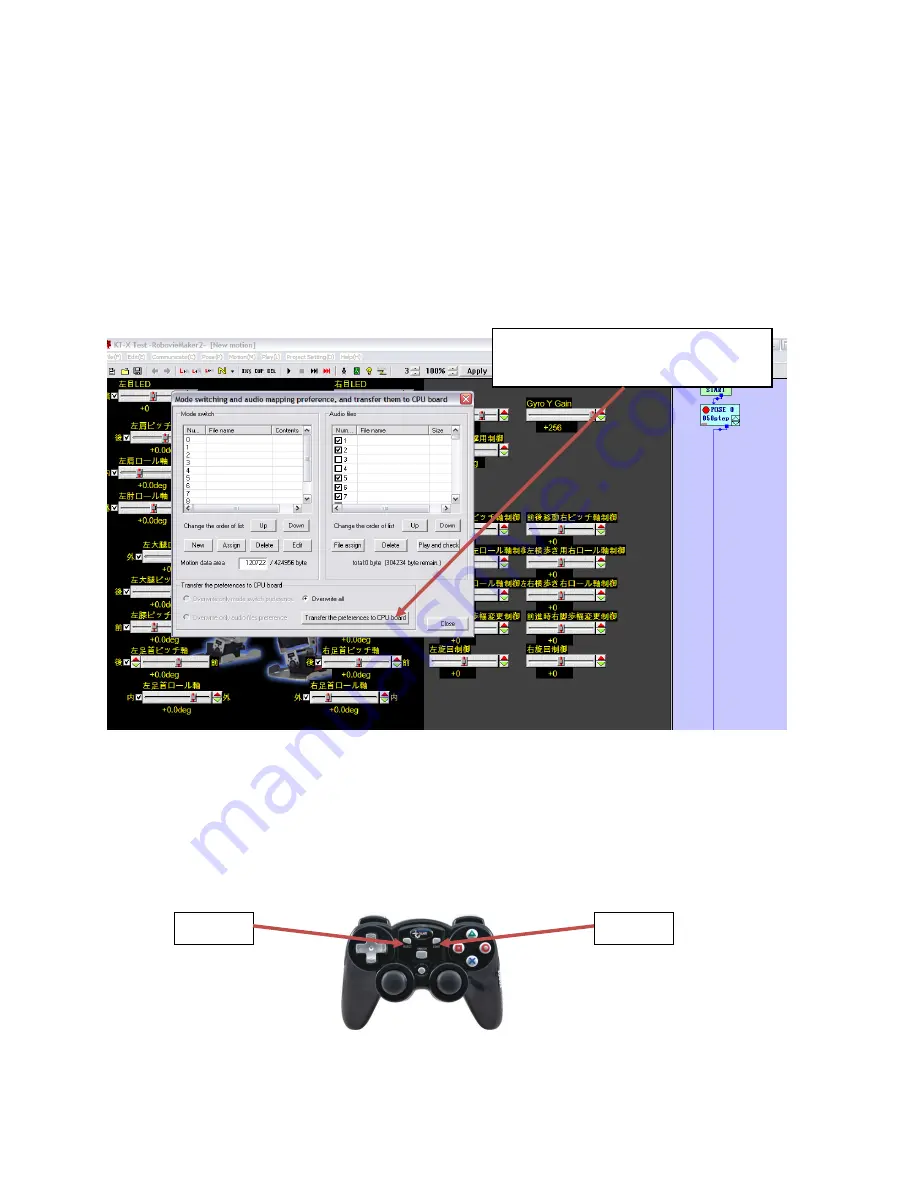
: …with power applied to the robot, and the rotary switch in the desired position, hold down the
“select” button on the remote control and push “start” (while holding continuously holding “select”).
Upload settings to the CPU’s flash
memory.
“select”
“start”
Summary of Contents for KT-X
Page 1: ......







































































