





























PLMNL0199 REV. J Effective Date: 08/05/21
13
FiberCUT
®
ST Operation Manual
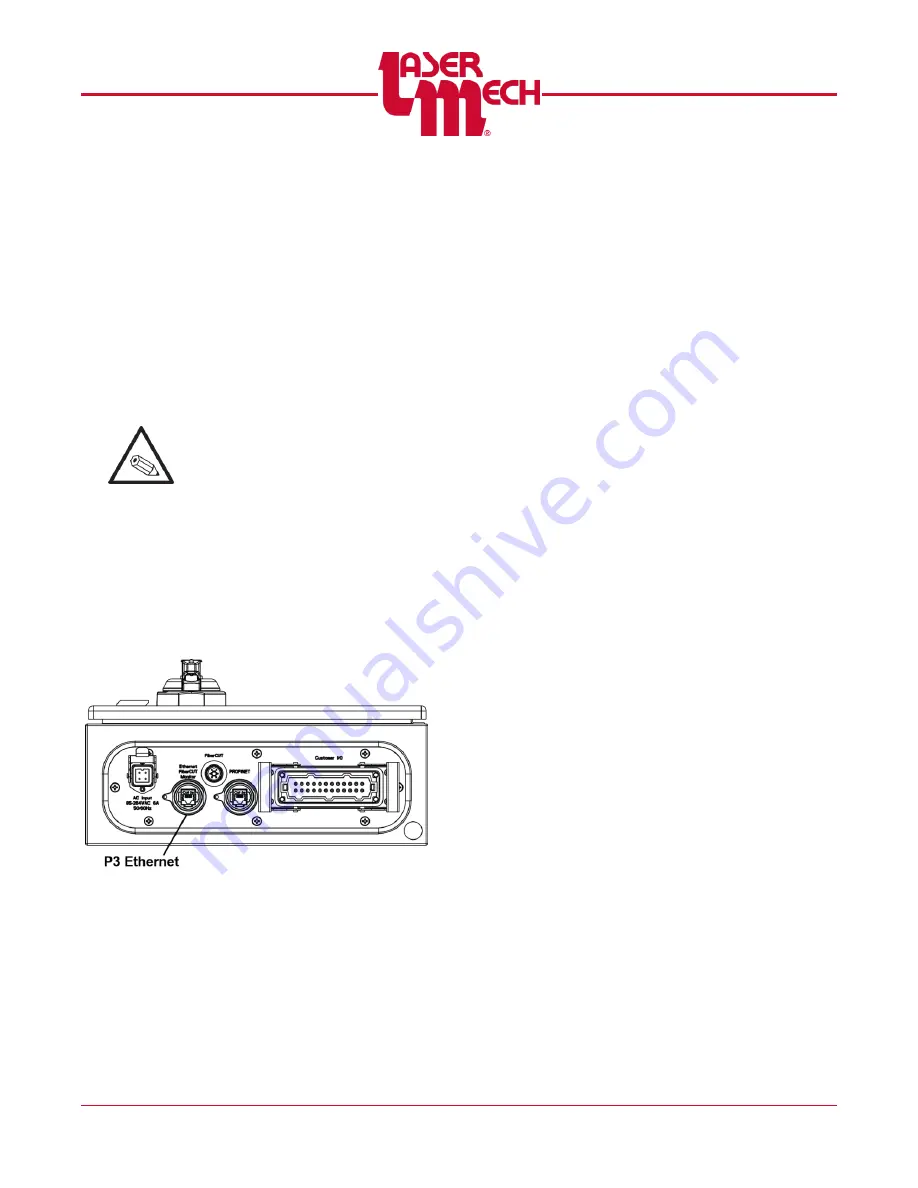
3.7 Ethernet Interface (P3)
The Ethernet port provides a means of
interfacing to the FiberCUT
®
controller with
all of the capabilities of the discrete I/O with
the addition of fault descriptions. Connect
the Ethernet port (P3) to your motion
system using a crossover or null modem
Ethernet cable, or to a network hub by a
straight through Ethernet cable. The
assigned controller IP Address is
169.254.99.12. A standard Windows Telnet
session can connect to the controller. See
Note: The commands and
inquiries interact directly with the
program running on the LM/Galil
controller. Unintentional alteration
of the program may result if
improper instructions are given.
Take care the commands to the
controller are accurate.
(Refer to Galil RIO-47IXO User
Manual for additional
information.)
Figure 17
3.7.1 Simulating Inputs (i1
– i8)
The variables i1
– i8 are used to
simulate the discrete inputs by
assigning the variables a value of 1 or
0.
Examples:
i1=0; i2=0; i3=1 - Sets the standoff
height to 1.25mm.
i5=1 - Turns on motion inhibit.
i5=0 - Turns off motion inhibit.
3.7.2 Simulate Analog Input (anlg)
The variable
anlg
simulates the
external analog input by assigning
values to the variable using the same
rules as the external analog input. The
standoff height is set with a value of 1
– 4, which gives a corresponding
standoff value of 0.5mm to 2.0mm.
Examples:
i7=1 - Activates external analog input.
anlg=2.5 - Sets the standoff height to
1.25mm.







































































