

























crystal standard configuration User Manual
Version: 6.4.0/4
27/149
6. Installation
6.4
Wiring
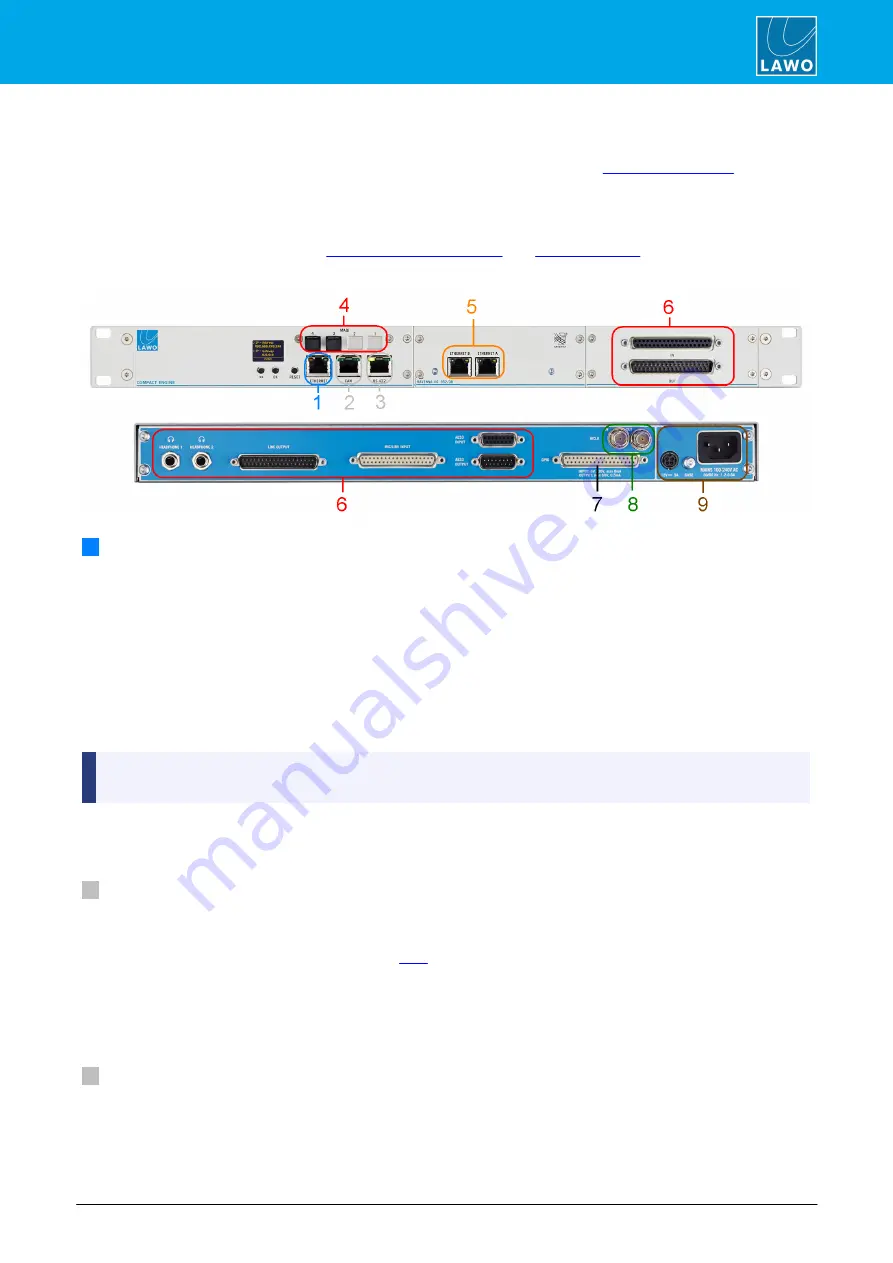
The system should be wired from the Compact Engine as follows. Please see
information.
For the initial setup, only ETHERNET (1), CAN (2) and Power (9) are required.
For the audio and GPIO connections, the functionality is defined by the configuration. Therefore, before wiring
these connectors, please refer to the
Compact Engine (front and rear)
1
ETHERNET (CAT 5e or better)
The ETHERNET port provides a network connection to the Compact Engine control system. It should connect to
the control PC running the DisplayDock software.
The connection can be made either directly or via a network switch. When connecting via a network, then this
can be shared with other devices, such as in the regular "house network" of a typical broadcast facility. Routers
are permitted as long as the minimum requirements below are met. By using routers, or similar devices, the
latency of the communication will increase. The control network
MUST
meet or exceed the following
requirements:
·
At least 100MBit/s; 1 GBit/s preferred
·
Full Duplex
It is important to keep the control network separate from the streaming network connected to the AoIP ports
(5).
For a direct connection, you will need a crossover network cable. For connection via a network switch, use a
straight (1:1) network cable. The cable should be STP-CAT 5e or better with RJ45 connectors.
To establish communication, you will need to configure the network settings on the control PC.
2
CAN (CAT 5e)
The CAN port connects the Compact Engine to the control surface (via CAN bus).
For a stand-alone surface, use a single point-to-point connection. If the surface has an extender, then you will
need to daisy-chain the CAN Bus (as described
).
All CAN bus connections must be point-to-point; a switch or hub is not allowed. Use a standard (straight 1:1)
network cable: STP-CAT 5e with RJ45 connectors.
The CAN bus can be hot-plugged, and so the cabling can be performed while the components are powered.
The maximum length of the CAN bus connection is 60 meters.
3
RS-422 (serial)
The serial port is usually left unconnected.