













D
D
B
B
8
8
1
1
0
0
A
A
D
D
i
i
g
g
i
i
t
t
a
a
l
l
D
D
C
C
S
S
e
e
r
r
v
v
o
o
D
D
r
r
i
i
v
v
e
e
r
r
M
M
a
a
n
n
u
u
a
a
l
l
V
V
1
1
.
.
0
0
Tel: (86)755-26434369
3
Web site: www.leadshine.com
Operating Environment and Parameters
Cooling
Natural cooling or forced cooling
Environment
Avoid dust, oil fog and corrosive gases
Ambient Temperature
0
º
C
–
50
º
C
Humidity
40
–
95%RH
Operating Environment
Vibration
5.9 m/s
2
Max
Storage Temperature
-20
º
C
–
+65
º
C
Weight
Approx. 130 grams (4.6 oz)
3. Connections
Connector Configuration
Term.
Pin
Descriptions
1
PUL+
Connect to positive pole of the pulse control signal.
2
PUL-
Connect to negative pole of the pulse control signal.
3
DIR+
Connect to positive pole of the direction control signal.
4
DIR-
Connect to negative pole of the direction control signal.
5
EB+
Connect to positive pole of the encoder channel B feedback signal.
6
EB-
Connect to negative pole of the encoder channel B feedback signal.
7
EA+
Connect to positive pole of the encoder channel A feedback signal.
8
EA-
Connect to negative pole of the encoder channel A feedback signal.
9
E +5V
Positive pole of the auxiliary power supply (50 mA (Max)).
10
EGND
Ground of the auxiliary power supply.
11
ERR/RES
Error alarm and reset/start port.
12
Motor+
Connect to positive pole of the DC servo motor.
13
Motor-
Connect to negative pole of the DC servo motor.
14
+18 TO 80VDC
Connect to positive pole of the +18 TO 80VDC power supply.
15
PGND
Connect to ground of the +18 TO 80VDC power supply.
D
D
B
B
8
8
1
1
0
0
A
A
D
D
i
i
g
g
i
i
t
t
a
a
l
l
D
D
C
C
S
S
e
e
r
r
v
v
o
o
D
D
r
r
i
i
v
v
e
e
r
r
M
M
a
a
n
n
u
u
a
a
l
l
V
V
1
1
.
.
0
0
Tel: (86)755-26434369
4
Web site: www.leadshine.com
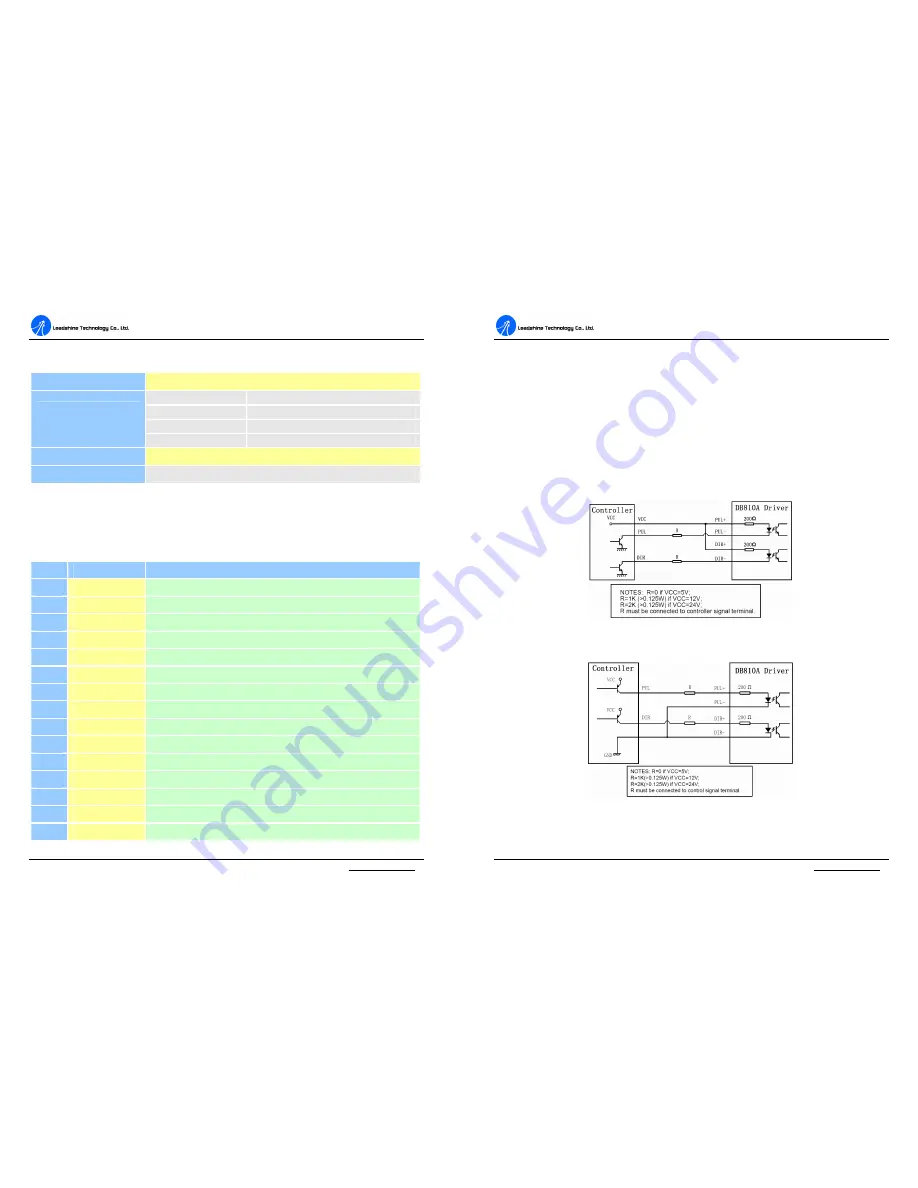
Control Signal Connections
The DB810A can accept differential and single-ended inputs (including
open-collector and PNP output). The DB810A have 2 optically isolated logic inputs
to accept line driver control signals. These inputs are isolated to minimize or
eliminate electrical noises coupled onto the drive control signals. Recommend use
line driver control signals to increase noise immunity in interference environments.
In the following figures, connections to open-collector and differential control
signals are illustrated.
Figure 2: Connections to open-collector control signal (common-anode)
Figure 3: Connections to PNP signal (common-cathode)







































































