





















EM522-CAN Field bus Stepper Drive User Manual V1.0
3
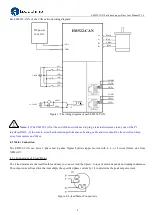
IN1+
Opto-isolation differential input signals (5~24V compatible)
IN1-
IN2+
IN2-
IN3+
IN3-
ALM+
Opto-isolation differential output signal is for alarm function. maximum output current 100mA,
maximum pull-up voltage 24VDC
ALM-
!
Notice
Notes:
(1) The function of input signals can be configured by controller
3.1.2 Connector P2
Pin Function
Details
GND
Power supply ground connection.
+VDC
Power supply positive connection. Suggest 24-48VDC power supply voltage
A+, A-
Motor Phase A connections. Connect motor A+ wire to A+ Pin; motor A- wire to A-
B+, B-
Motor Phase B connections. Connect motor B+ wire to B+ Pin; motor B- wire to B-
!
Warning
Warning:
(1) Don’t plug or unplug the P2 terminal block to avoid drive damage or injury when EM522-CAN is
powered on; (2) Don't connect the power supplier to motor connection terminal, and don't cVDC and GND
inversely, otherwise, drive will be damaged.
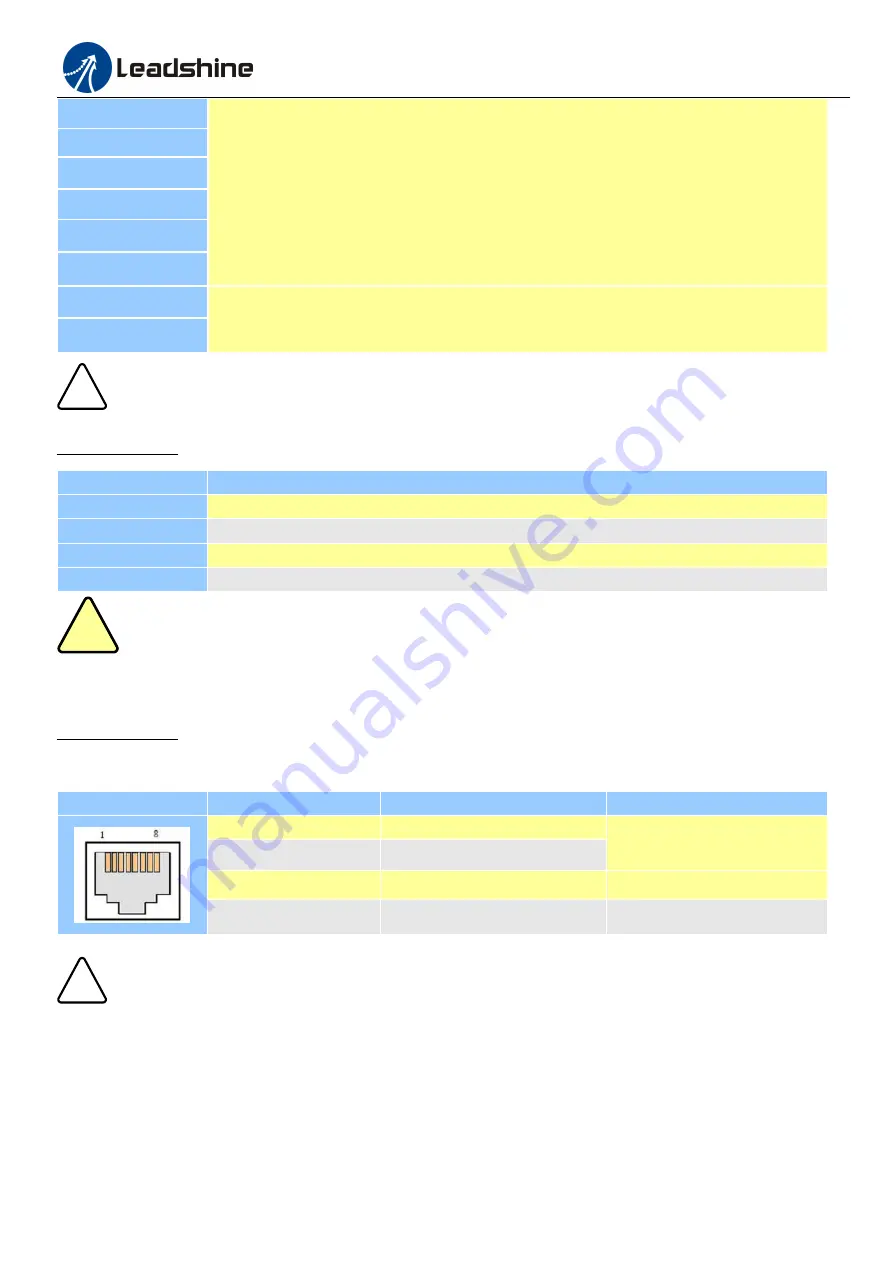
3.1.3 Connector P3
CAN port of EM522-CAN adopt shield doublet RJ45 terminal (standard RJ45 specification).
PIN definition
PIN
Signal
Details
1
CAN_H
Differential signal of CAN
2
CAN_L
3
CAN_GND
CAN ground
4~8
NC
-
!
Notice
Notes:
(1) shielding cable and reliable grounding is suggested; (2) CAN_H and CAN_L should not connect
inversely; (3) Two interfaces of RJ45 without order.
3.2 DIP Switch
EM522-CAN field bus stepper drive uses an 8-bit DIP switch to set CAN ID, baud rate, as shown below:







































































