





























iEM-RS Series Modbus RS485 Integrated Stepper Motor
25
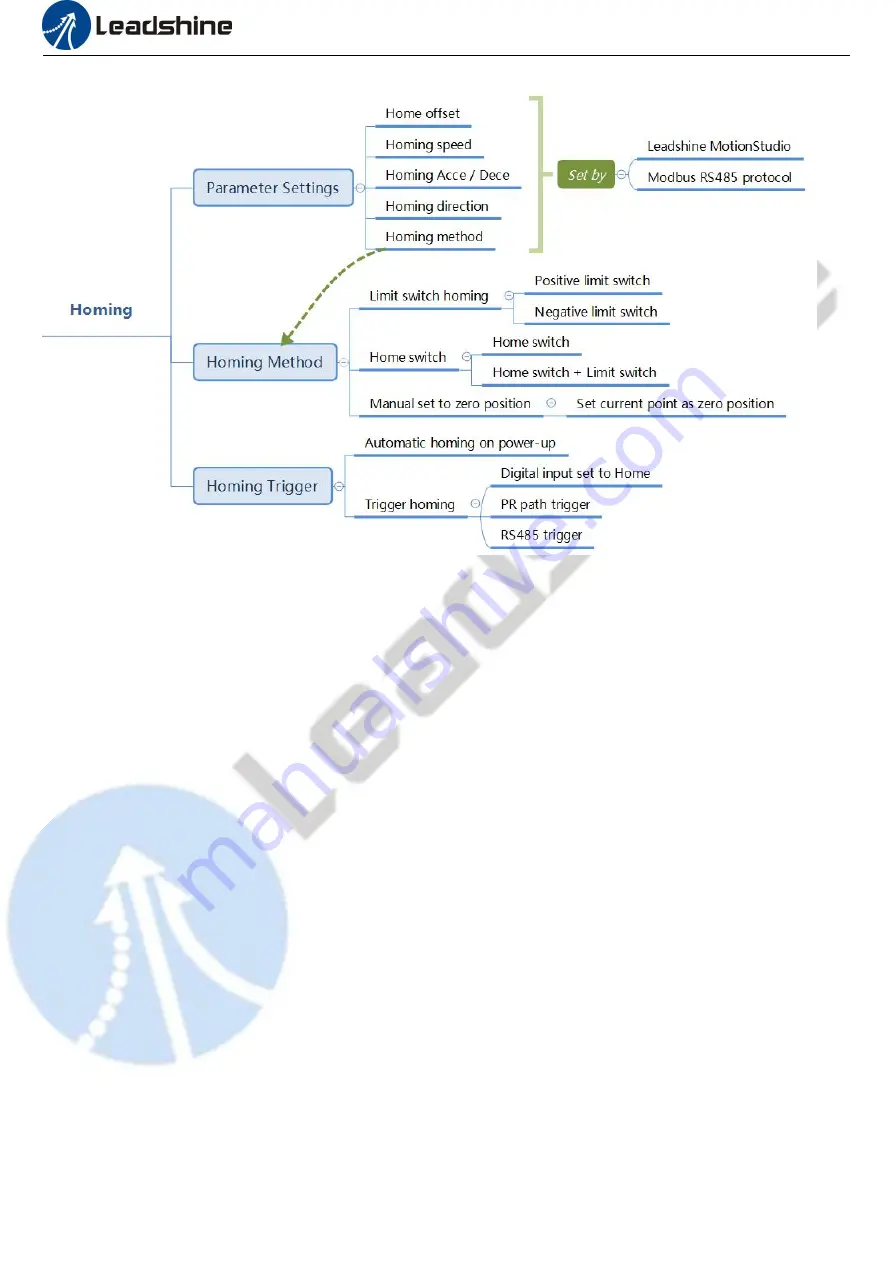
Zero Position:
a fixed position on the machine can correspond to a definite digital input signal, or to a Z signal
Zero Point of Machine:
mechanical absolute zero position
Home offset:
difference between zero position and zero point of machine, the value of Object 607Ch (default =
0 ), Zero position= zero point + home offset
Home Switch:
homing switch input signal
Negative Limit:
negative limit switch input signal
Positive Limit:
positive limit switch input signal
Trigger method of homing:
Automatic homing on power-up: After the drive is powered on, the motor will automatically search the zero position.
Trigger to homing: when IO port set to Home function triggered by external level, or trigger via Modbus RS485.
Homing method:
Limit switch homing: Set by register address 0x600A, or Leadshine software. If the homing direction is positive, then it is
positive limit switch homing. Conversely, the negative limit homing.
Home switch: Set by register address 0x600A, or Leadshine software. If the motor turns toward the home switch when
zeroing, it will use the home switch it touches as the home point; if the motor turns in the opposite direction when zeroing,
it will automatically reverse to find the home point after it touches the limit switch.
Manual set to zero position: Set by register address 0x600A, or by tuning software. After triggering, the current value of
the motor is cleared to zero and the current point is used as the origin.
Note: In the normal homing, because the motor to find the origin process is slowed down and stopped, so after finding the
origin will move a certain distance, the actual read position value may not be 0, in this case, you can check the "return to the
origin to move to the specified position", that is, move to the 0 position.







































































