








M542T Microstepping Driver Manual V1.0
SepperOnline
0086-25-87156578
1
1. Introduction, Features and Applications
Introduction
The M542T is a high performance micro stepping driver based on pure-sinusoidal current control technology. Owing to the above
technology and the self-adjustment technology (self-adjust current control parameters) according to different motors, the driven
motors can run with smaller noise, lower heating, smoother movement and have better performances at higher speed than most of
the drivers in the markets. It is suitable for driving 2-phase and 4-phase hybrid stepping motors.
Features
High performance, cost-effective
Supply voltage up to 50DC
Output current up to 4.5A
Self-adjustment technology
Pure-sinusoidal current control technology
Pulse input frequency up to 300 KHz
TTL compatible and optically isolated input
Automatic idle-current reduction
16 selectable resolutions in decimal and binary, up to 51,200 steps/rev
Suitable for 2-phase and 4-phase motors
Short-voltage, over-voltage, over-current and short-cicuit protection
Applications
Suitable for a wide range of stepping motors, from NEMA size 17 to 34. It can be used in various kinds of machines, such as X-Y
tables, labeling machines, laser cutters, engraving machines, pick-place devices, and so on. Particularly adapt to the applications
desired with low noise, low heating, high speed performance.
2. Specifications
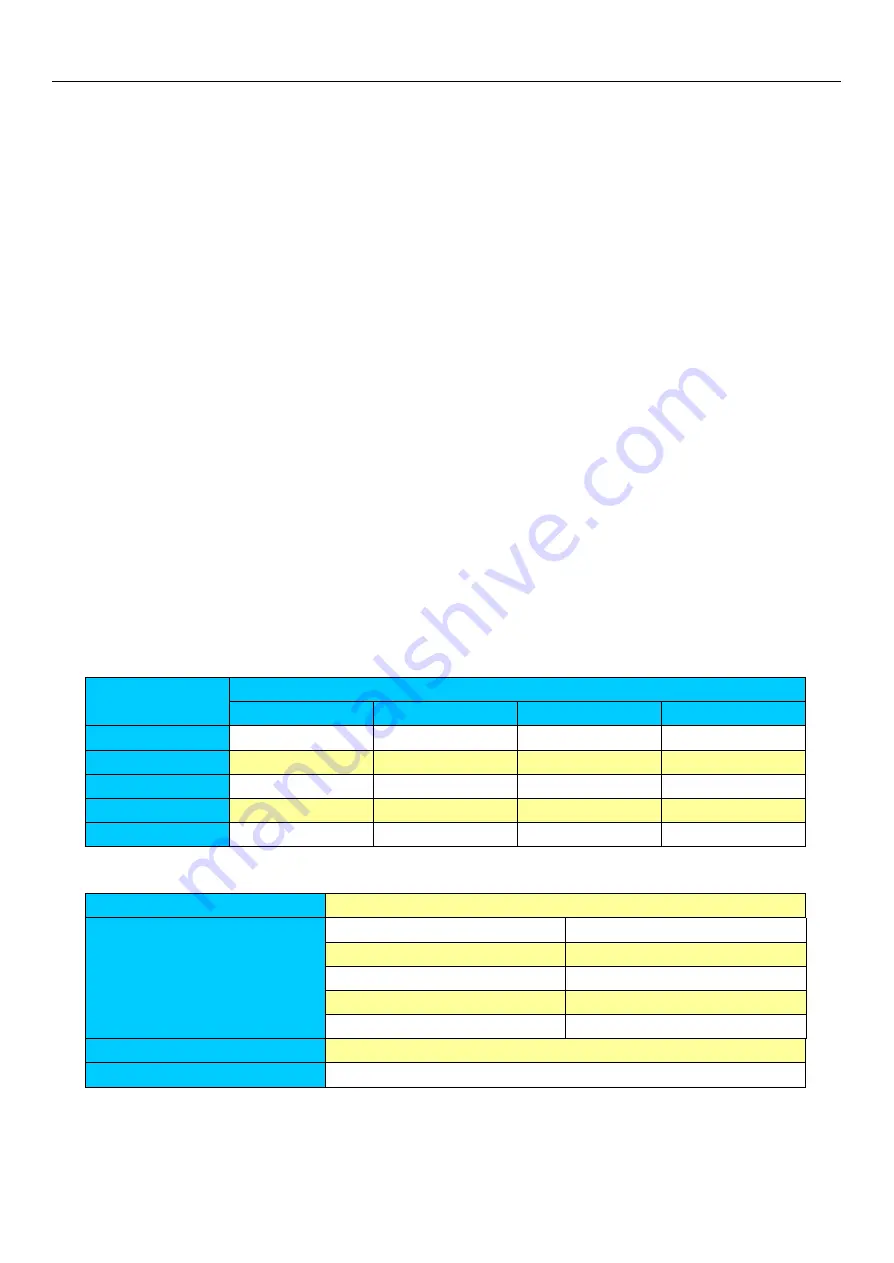
Electrical Specifications
(T
j
= 25
℃
/77
℉
)
Parameters
M542T
Min
Typical
Max
Unit
Output current
1.5
-
4.5(3 RMS)
A
Supply voltage
+24
+36
+50
VDC
Logic signal current
7
10
16
mA
Pulse input frequency
0
-
300
KHz
Isolation resistance
500
MΩ
Operating Environment and other Specifications
Cooling
Natural Cooling or Forced cooling
Operating Environment
Environment
Avoid dust, oil fog and corrosive gases
Ambient Temperature
0
℃-
50
℃
(32
℉ -
122
℉
)
Humidity
40%RH
-
90%RH
Operating Temperature
70
℃
(158
℉
) Max
Vibration
5.9m/s2 Max
Storage Temperature
-20
℃ -
65
℃
(-4
℉ -
149
℉
)
Weight
Approx. 290g







































































