





























CS3E Series EtherCAT Closed Loop Stepper Drive User Manual
39
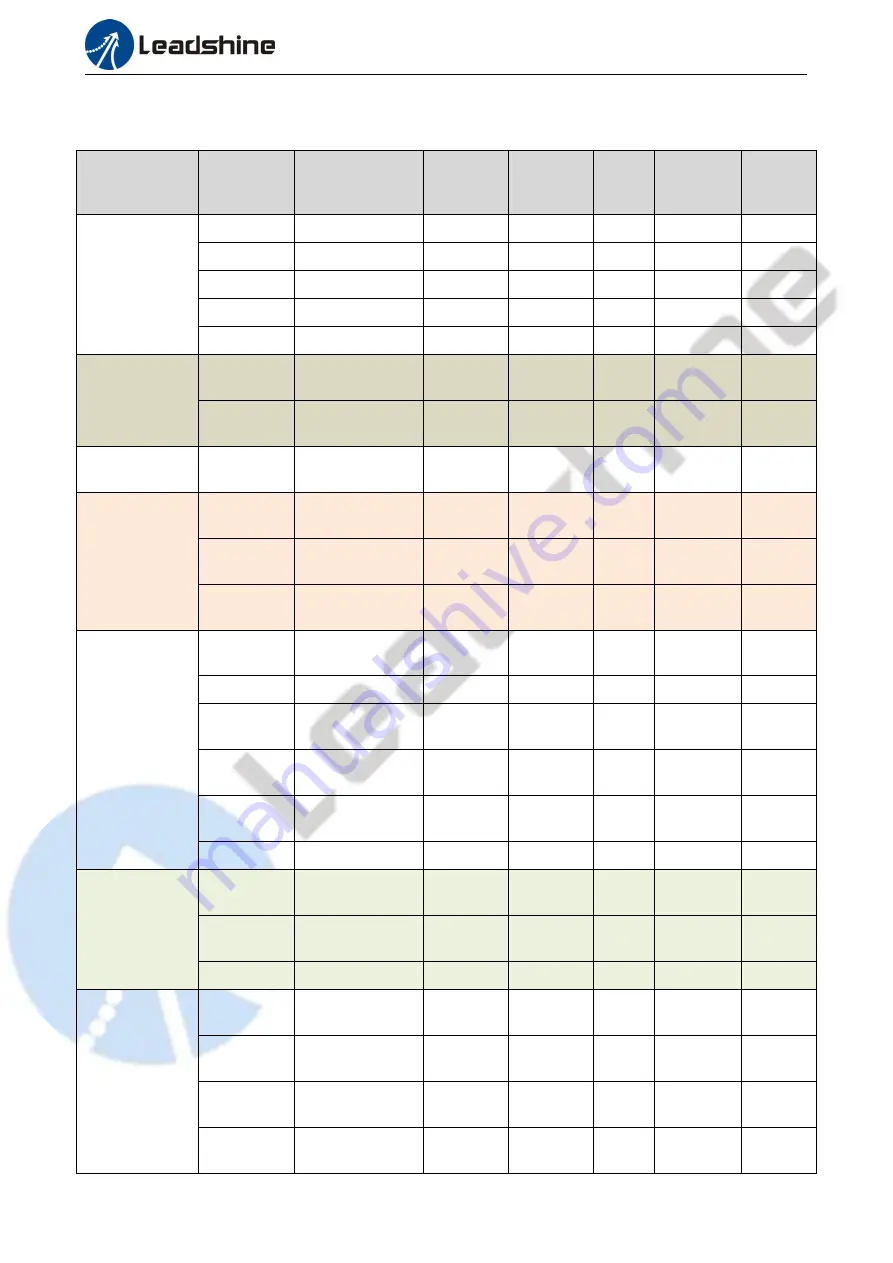
The object dictionary of each control mode are shown as below:
Table 6.2: Control word
Operation
Modes
Index +
Sub-index
Name
Data Type
Access
Unit
PDO
Configurat
ion
SDO
Configur
ation
CSP Mode (8)
6040-00h
Control Word
U16
RW
—
Must
-
607A-00h
Target Position
I32
RW
P
Must
-
6041-00h
Status Word
U16
RO
—
Must
-
6064-00h
Actual Position
I32
RO
P
Must
-
606C-00h
Actual Velocity
I32
RO
P /S
Can
Can
PP Mode (1)
607A-00h
Target Position
I32
RW
P
Recomme
nd
Can
6081-00h
Max Profile
Velocity
U32
RW
P
Can
Can
PV Mode (3)
60FF-00h
Target Velocity
I32
RW
P
Recomme
nd
Can
PP Mode (1)
And PV Mode
(3)
shared
6040-00h
Control Word
U16
RW
—
Recomme
nd
Can
6083-00h
Profile
Acceleration
I32
RW
P/S
2
Can
Can
6084-00h
Profile
Deceleration
U32
RW
P/S
2
Can
Can
Homing Mode
(6)
6040-00h
Control Word
U16
RW
—
Recomme
nd
Can
6098-00h
Homing Method
I8
RW
—
Can
Can
6099-01h
Fast
Homing
Velocity
U32
RW
P /S
Can
Can
6099-02h
Slow Homing
Velocity
U32
RW
P /S
Can
Can
609A-00h
Homing
Acceleration
U32
RW
P /S
2
Can
Can
607C-00h
Home Offset
U32
RW
P
Can
Can
PP, PV and
HOME
Mode shared
6041-00h
Status Word
U16
RO
—
Recomme
nd
Can
6064-00h
Actual Position
I32
RO
P
Recomme
nd
Can
606C-00h
Actual Velocity
I32
RO
P /S
Can
Can
All operation
modes shared
60B8-00h
Touch Probe
Control Word
U16
RW
—
Recomme
nd
Can
60B9-00h
Touch Probe
Status Word
U16
RO
—
Recomme
nd
Can
60BA-00h
Touch Probe 1
Positive Value
I32
RO
P
Can
Can
60FD-00h
Digital Input
Status
U32
RO
—
Recomme
nd
Can







































































