





























User Manual for ELD2-CAN Servo
www.leadshine.com
46
Pr4.36
Name
At-speed(Speed arrival)
Mode
PV
Range
10~2000
Unit
RPM
Default
1000
Index
2436h
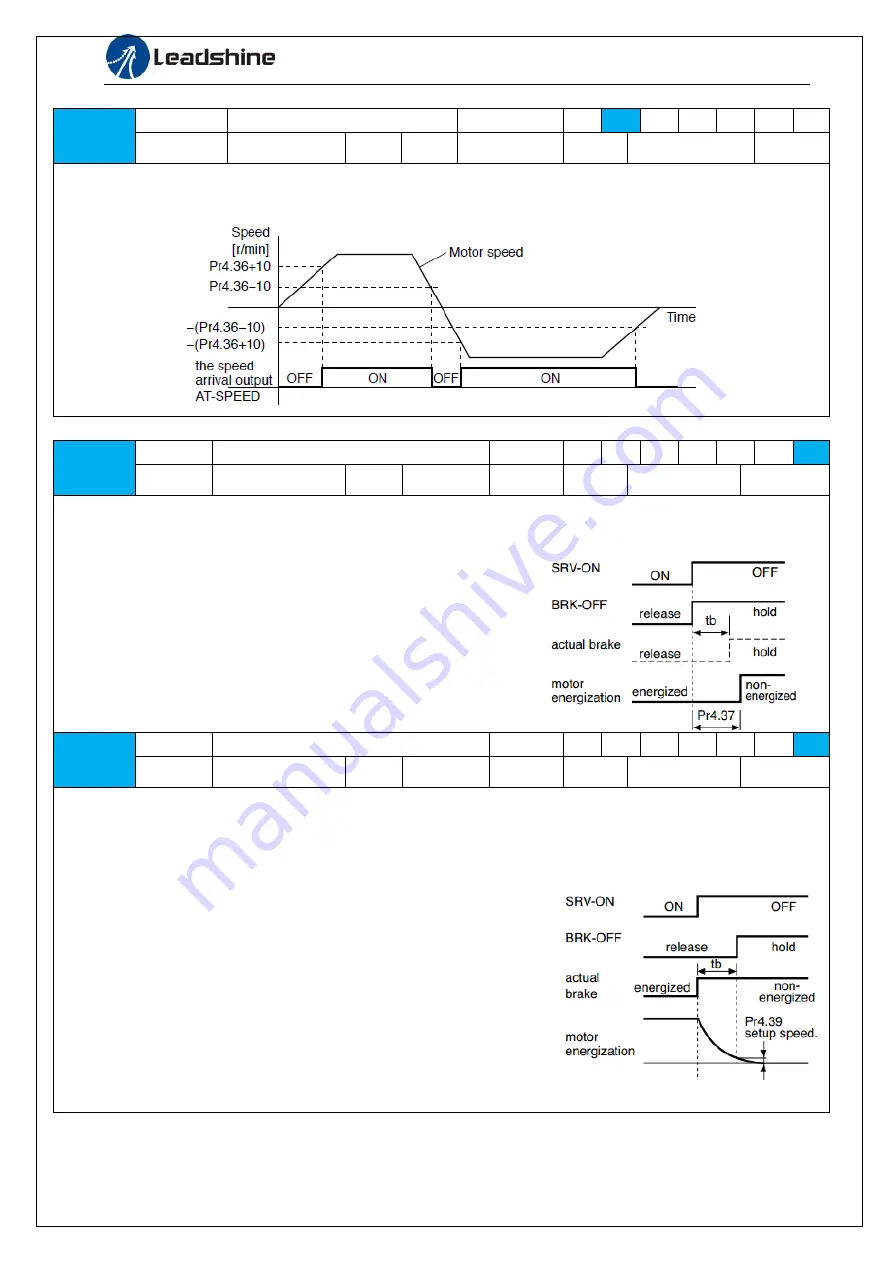
Set the detection timing of the speed arrival output (AT-SPEED).
When the motor speed exceeds this setup value, the speed arrive output (AT-SPEED) is output.
Detection is associated with 10r/min hysteresis .
Pr4.37
Name
Mechanical brake action at stopping
Mode
F
Range
0~10000
Unit
1ms
Default
0
Index
2437h
Motor brake delay time setup, mainly used to prevent servo on “galloping “phenomenon.
Set up the time from when the brake release signal(BRK-OFF) turns off to when the motor is de-energized
(servo-free),when the motor turns to servo-off while the motor is at stall
Set up to prevent a micro-travel/drop of the motor
(work) due to the action delay time(tb) of the brake.
After setting up Pr4.37>=tb, then compose the sequence
so as the drive turns to servo-off after the brake is
actually activated.
Pr4.38
Name
Mechanical brake action at running setup
Mode
F
Range
0~10000
Unit
1ms
Default
0
Index
2438h
Mechanical brake start delay time setup, mainly used to prevent servo off “galloping “phenomenon.
Set up time from when detecting the off of servo-on input signal(SRV-ON)is to when external brake
release signal(BRK-OFF)turns off, while the motor turns to servo off during the motor in motion.
Set up to prevent the brake deterioration due to the motor running.
At servo-OFF during the motor is running , tb of the right fig
will be a shorter one of either Pr4.38 setup time, or time
lapse till the motor speed falls below Pr4.39 setup speed.







































































