





























User Manual for ELD2-CAN Servo
www.leadshine.com
90
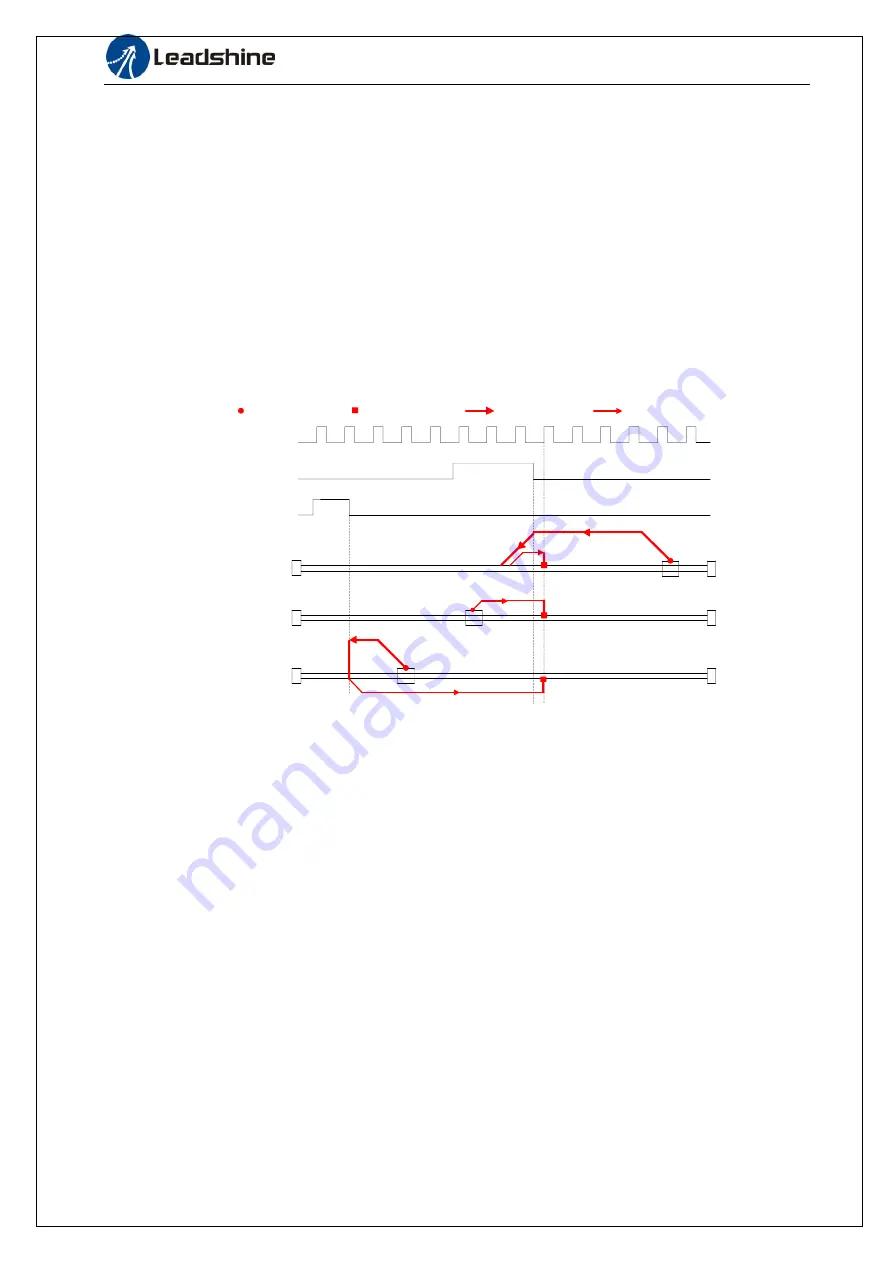
Method 11
If the homing switch and negative limit switch is invalid, the motor will move in negative direction at
high speed until the homing switch signal is valid. Then the motor reverse the direction at low speed. The
motor stops after leaving the homing switch and the first encoder Z signal is valid, as shown in figure.
If the negative limit switch is invalid and motor stops at the homing switch position when it starts to move,
the motor will move in positive direction at low speed. The motor stops after leaving the homing switch and
the first encoder Z signal is valid, as shown in figure.
If the homing switch and positive limit switch is invalid, the motor will move in negative direction at high
speed until the negative limit switch valid. Then the motor reverse the direction at low speed. The motor stops
after the homing switch invalid and the first encoder Z signal is valid, as shown in figure.
If the positive limit switch signal is valid during the homing process, the status word (6041h) bit 13 will
be valid, indicating that the homing error and the motor will stop immediately.
Z signal
HOME-SWITCH
B
Start Position
Stop Position
High speed
6099h-01h
Low speed
6099h-02h
NOT signal
A
C
Method 12
:
If the homing switch and positive limit switch is invalid, the motor will move in negative direction at low
speed. The motor stops after the homing switch valid and the first encoder Z signal is valid, as shown in figure.
If the negative limit switch is invalid and motor stops at the homing switch position when it starts to move,
the motor will move in positive direction at high speed until the homing switch signal is invalid. Then the
motor reverse the direction at low speed. The motor stops after the homing switch valid and the first encoder Z
signal is valid, as shown in figure.
If the homing switch and negative limit switch is invalid, the motor will move in negative direction at low
speed until the positive limit switch valid. Then the motor reverse the direction at high speed until the homing
switch invalid. Then the motor move in negative direction at low speed. The motor stops after the homing
switch valid and the first encoder Z signal is valid, as shown in figure.
If the positive limit switch signal is valid during the homing process, the status word (6041h) bit 13 will be
valid, indicating that the homing error and the motor will stop immediately.







































































