





























User Manual for ELD2-CAN Servo
www.leadshine.com
94
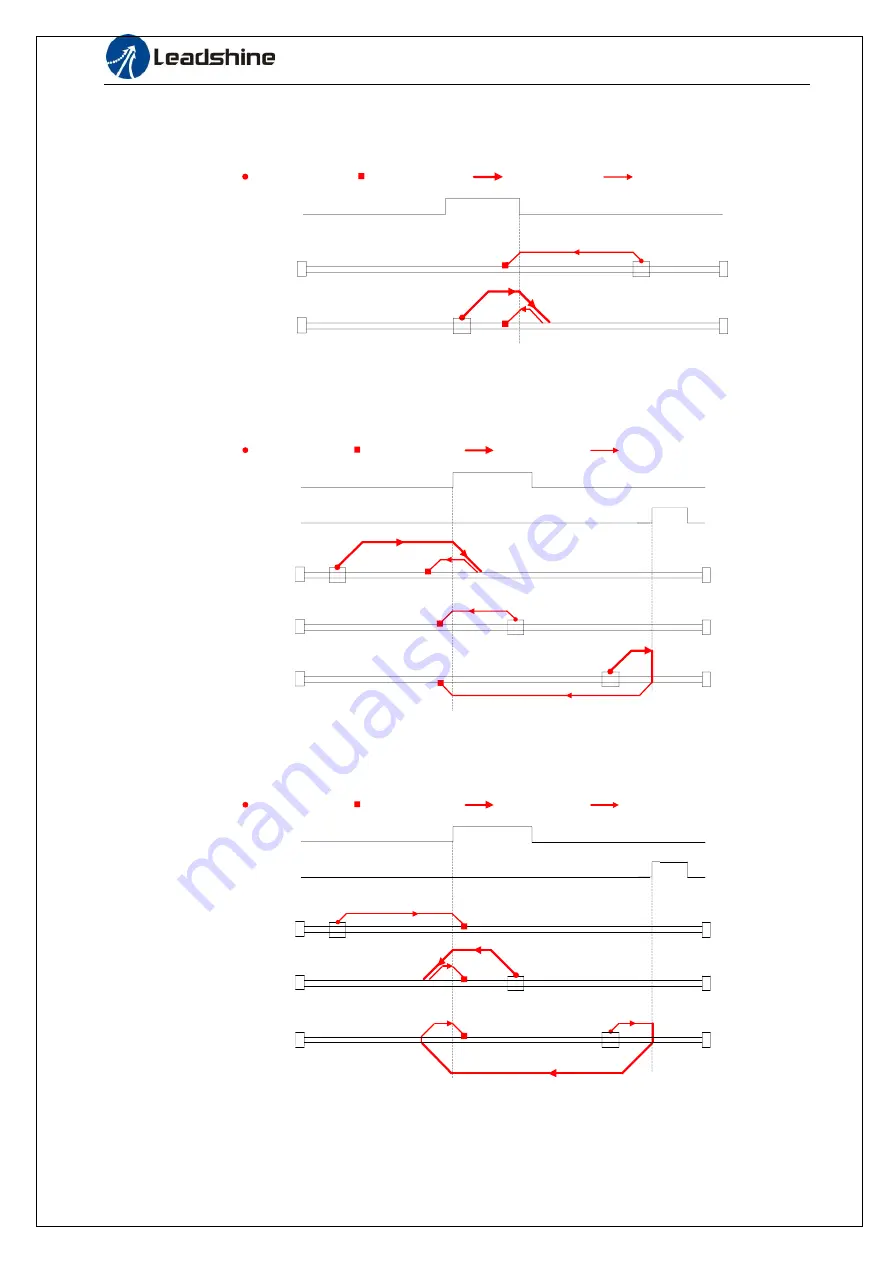
Method 22
:
This method is similar to method
6
HOME-SWITCH
A
B
Start Position
Stop Position
High speed
6099h-01h
Low speed
6099h-02h
Method 23
:
This method is similar to method 7
HOME-SWITCH
B
Start Position
Stop Potion
High speed
6099h-01h
Low speed
6099h-02h
POT signal
A
C
Method 24
:
This method is similar to method 8
HOME-SWITCH
B
Start Position
Stop Position
High speed
6099h-01h
Low speed
6099h-02h
POT signal
A
C







































































