





























User Manual of iSV2-CAN Servo
www.leadshine.com
24
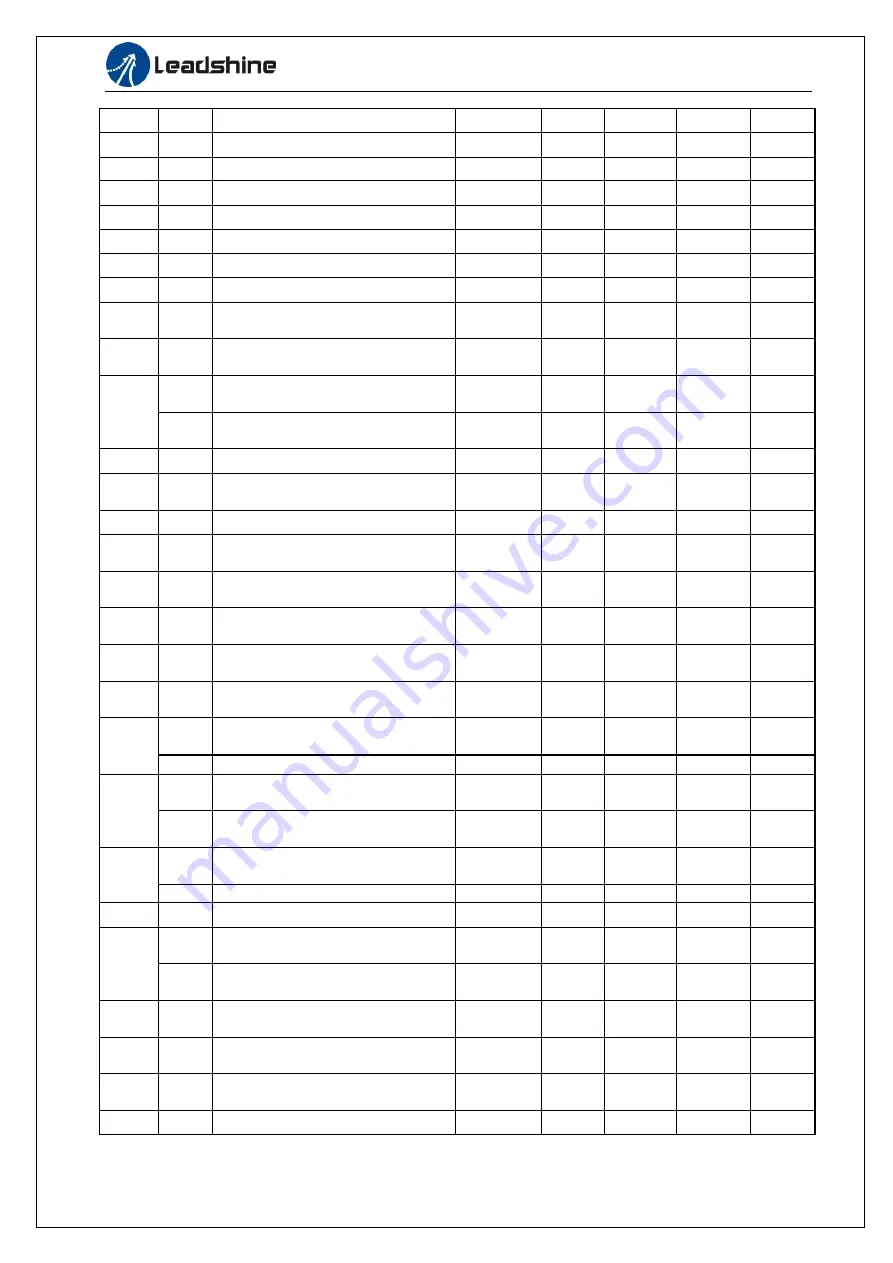
6071
0
Ta rget torque
0.1%
0
-32768
32767
pt
6072
0
Ma x torque
0.1%
3000
0
65535
ALL
6073
0
Ma x current
0.1%
-
-
-
ALL
6074
0
Interna l torque comma nd
0.1%
-
-
-
ALL
6075
0
Ra ted current
mA
-
-
-
ALL
6076
0
Ra ted torque
mN.M
6077
0
Actua l torque
0.1%
-
-
-
ALL
6079
0
Bus volta ge
mV
-
-
-
ALL
607A
0
Ta rget position
Comma nd
unit
0
-214748
3648
2147483
647
pp
607C
0
Homing position offset
Comma nd
unit
0
-214748
3648
2147483
647
ALL
607D
1
Minimum soft limit
Comma nd
unit
0
-214748
3648
2147483
647
pp
2
Ma ximum soft limit
Comma nd
unit
0
-214748
3648
2147483
647
pp
607E
0
Motor rota tion direction
-
0
0
255
ALL
607F
0
Ma ximum protocol speed (Restricted
by 6080)
Comma nd
unit /s
6080
0
Ma ximum motor speed
r/min
5000
0
6000
ALL
6081
0
protocol speed (Restricted by 607F)
Comma nd
unit /s
10000
0
2147483
647
pp
6083
0
Profile a ccelera tion
Comma nd
unit /s/s
10000
1
2147483
647
pp/pv/
6084
0
Profile decelera tion
Comma nd
unit /s/s
10000
1
2147483
647
pp/pv
6085
0
Quick stop decelera tion
Comma nd
unit /s/s
100000
00
1
2147483
647
pp/pv/
hm
6087
0
Torque cha nge ra te
0.1%
/s
100
1
2147483
647
pt
608F
1
Encoder resolution
Encoder
unit
-
-
-
ALL
2
Motor turns
-
6091
1
Electron gea r molecule
-
1
1
2147483
647
ALL
2
Electronic gea r denomina tor
-
1
1
2147483
647
ALL
6092
1
Number of pulses per rota tion
Comma nd
unit
10000
1
2147483
647
ALL
2
Number of physica l a xis turns
-
6098
0
Homing method
-
19
-6
37
hm
6099
1
High speed of homing
Comma nd
unit /s
10000
0
2147483
647
hm
2
Low speed of homing
Comma nd
unit /s
5000
0
2147483
647
hm
609A
0
Homing a ccelera tion
Comma nd
unit /s
2
10000
0
2147483
647
hm
60B0
0
Position feedforwa rd
Comma nd
unit
0
-214748
3648
2147483
647
60B1
0
Velocity feedforwa rd(Restricted by
6080)
Comma nd
unit /s
0
-214748
3648
2147483
647
pp/pv/
hm
60B2
0
Torque feedforwa rd
0.1%
0
-32768
32767
ALL







































































