





























2F-85 & 2F-140 - Instruction Manual
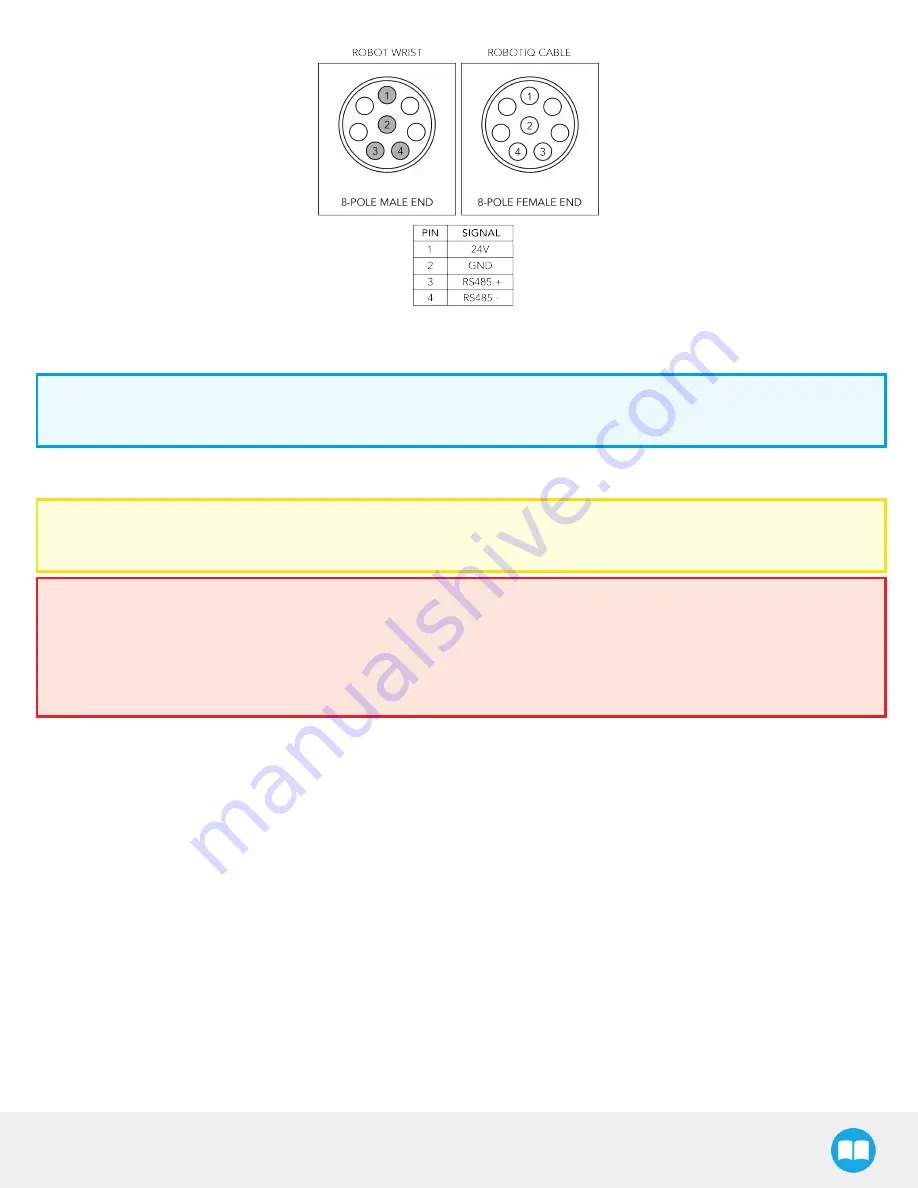
Fig. 3-17: Pinout of the 2-Finger cable-to-wrist coupling
Info
Power supply, communication signals, grounding, electrical resistance and fusing are managed by the robot itself.
Multiple Grippers
Caution
For multiple gripper configurations, connect the M8 splitter to the robot wrist connector.
Warning
In order to connect two or more grippers at the same time on a robot, each gripper must have a coupling for the transmission
of power and communication signals, a dual gripper adapter plate to mechanically mount the gripper on the robot arm, and
a splitter.
Please refer to the Spare Parts, Kits and Accessories section for more details.
35






































































