





























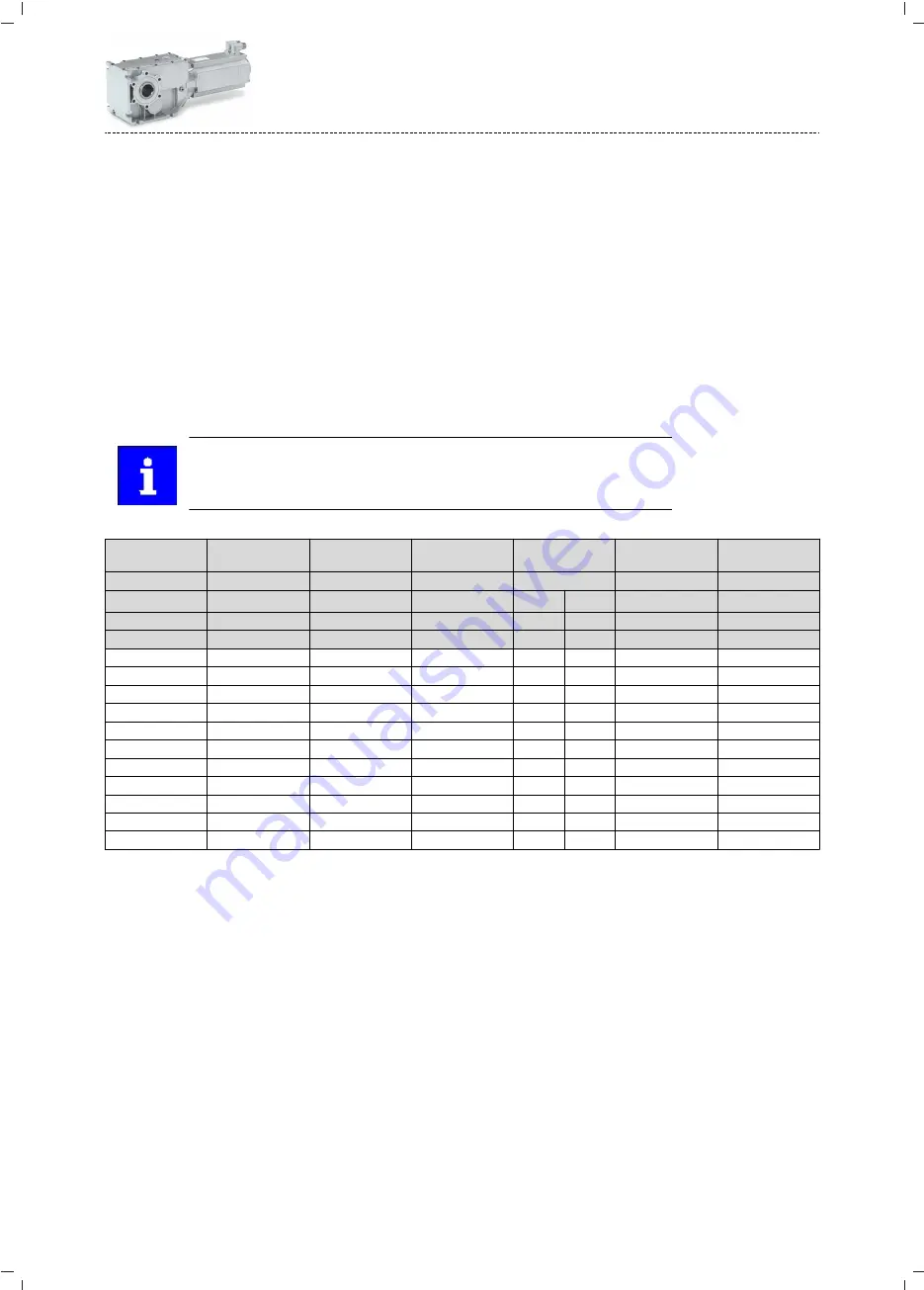
Data overview
The following tables contain the most important data of the gearbox.
The data given for speed, torque and power are valid if the
•
input speed n
1
= 1400 rpm
•
Application factor c= 1.0
The data for the max. radial force refer to
•
Gearbox design: Solid shaft without flange
•
output shaft bearing: normal bearing
•
Application factor c= 1.3
Further designs
Radial forces and axial forces
In order to calculate the exact ratio, the number of teeth z
g
(driven) can be divided by the
number of teeth z
t
(driving). These are rounded values.
The rated torque can be gathered from the last digits of the product name e.g.
g500-B110 (110 Nm).
g500-B110, 2-stage
Output speed
Max. output
torque
Max. drive power
Ratio
Number of teeth
Max. radial force
Backlash
Standard
n
2
M
2,max
P
1,max
i
z
g
z
t
F
rad,max
± 20 %
rpm
Nm
kW
N
arcmin
270
69
2.05
5.185
140
27
2450
21
235
72
1.86
5.963
161
27
2530
21
197
77
1.67
7.111
64
9
2620
20
171
81
1.53
8.178
368
45
2670
20
154
84
1.42
9.101
1720
189
2730
20
134
89
1.31
10.466
1978
189
2830
20
122
90
1.21
11.449
2576
225
2890
20
110
90
1.09
12.698
800
63
2950
20
96
90
0.95
14.603
920
63
3000
20
90
92
0.91
15.556
140
9
3000
20
78
96
0.83
17.889
161
9
3000
20
Technical data
Data overview
41
Summary of Contents for g500-B
Page 1: ...Geared servo motors Bevel geared servo motor g500 B m850 Project planning EN ...
Page 2: ......
Page 137: ......
Page 138: ......
Page 139: ......







































































