




























Appendix
Parameter set management
Printing parameter sets
10
185
SW-HB 13.0002-EN EN 3.0
10.6.3
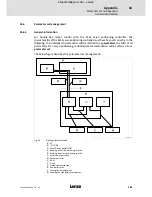
Printing parameter sets
Select the menu items
File
Parameter set
to print, display or save parameter sets
in plain text format: The following menu appears:
931e_340
Inthe
Print positions
field of this menu, you canselect the positions to be printed at the end
of the parameter list.
The selection has the following effects on the plain text output:
ƒ
none
the parameter list will be output without position sets. Approx. 5 pages
ƒ
all
all 64 position sets will be output. Approx. 7 pages
ƒ
from ... to
the position range can be explicitly defined
Meaning of the Print menu buttons:
ƒ
Additional information: Calls the sub-menu of the same name
ƒ
Page preview: Generates the plain text and displays it on the screen
ƒ
Print: Generates the plain text and prints it out.
ƒ
Save as text file: Generates the plain text and saves it under a user-defined name.
The subdirectory \txt is used as default directory for the plain text.
When the plain text for Page preview and Print is created, the file $$$.txt will be written
in the sub-directory \txt.
efesotomasyon.com - Lenze







































































