





























Chapter 15. The PID functions
15-6
15.2.1.3
Derivative operation (D action)
(1) When a deviation occurs due to alteration of SV or external disturbances, D
action restrains the changes of the deviation by producing MV which is
proportioned wi th the change velocity (a velocity whose deviation changes at
every constant interval) in order to eliminate the deviation.
4
D action gives quick response to control action and has an effect to reduce
swiftly the deviation by applying a large control action (in the direction that the
deviation will be eliminated) at the earlier time that the deviation occurs.
4
D action can prevent the large changes of control object due to external
conditions.
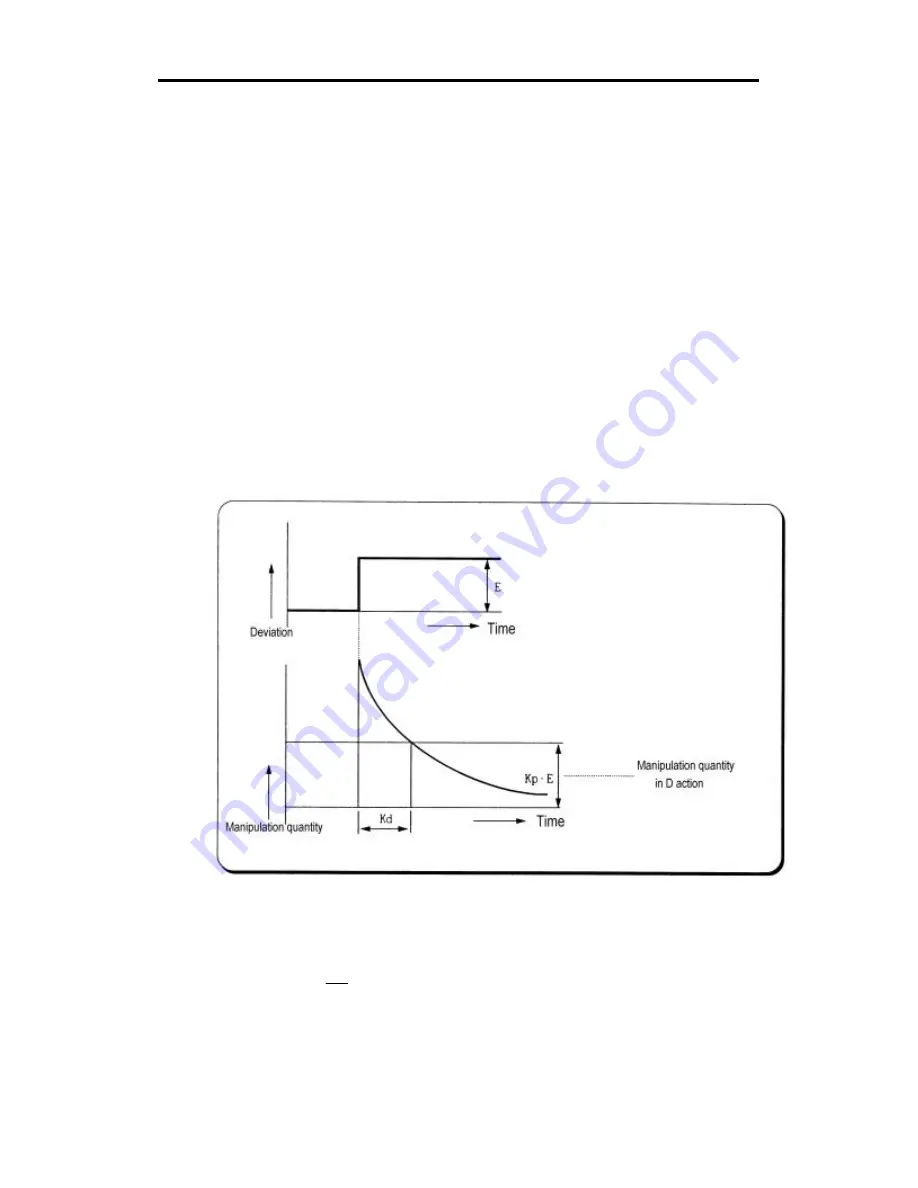
(2) The period of time from when the deviation has occurred to when the MV of D
action become the MV of P action is called derivative time and represented as Kd.
(3) The D action when a constant deviation occurred is shown as Fig. 2.7.
Fig. 2-7 Derivative action with a constant deviation
(4) The expression of D action is as following;
dt
dE
Td
Kp
MV
×
=
(5) Derivative action is used only in PID action in which P and I actions combine with







































































