





























Chapter 15. The PID functions
15-9
15.2.1.6
Reference value
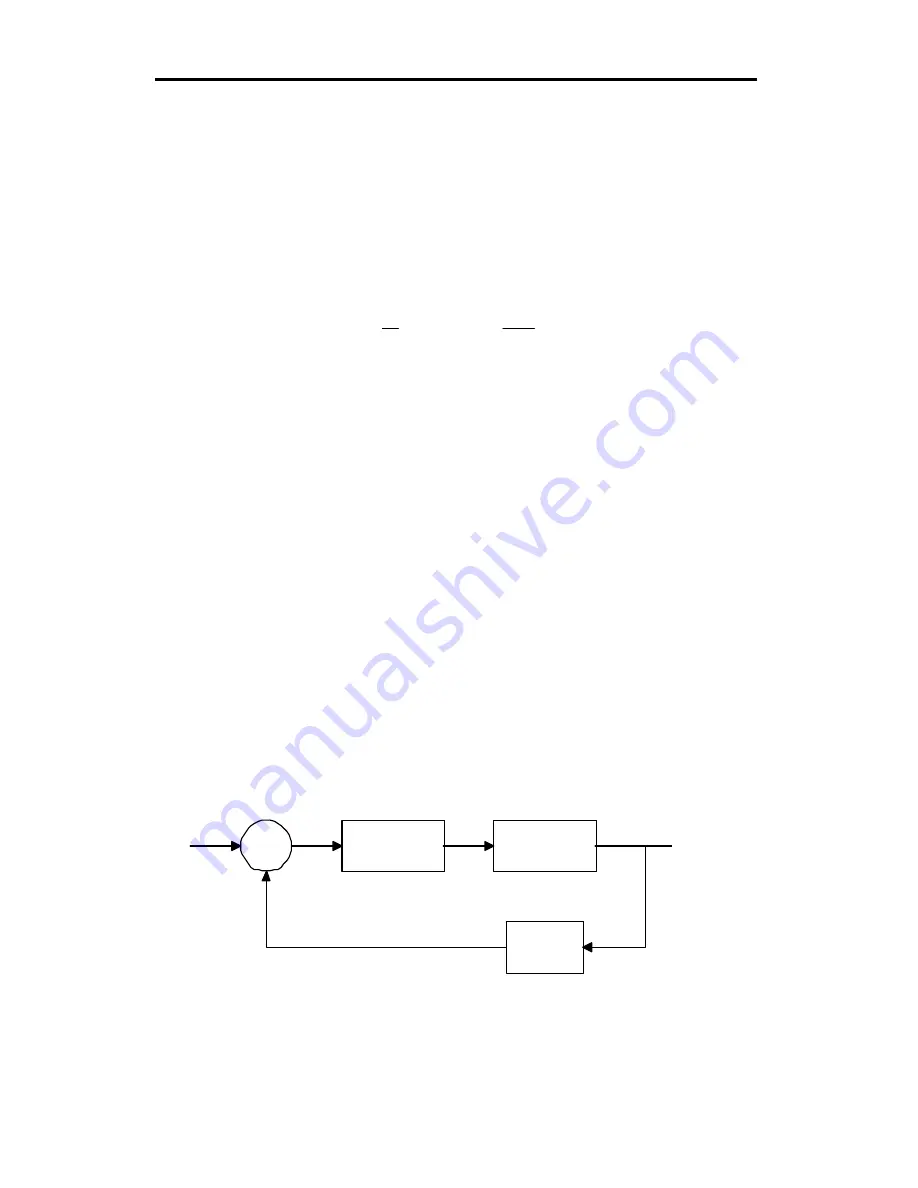
In general feedback control system shown as the Figure 2-10, the deviation value is
obtained by the difference of PV and SV. P, I, and D operations are performed based
on this deviation value. However, each of P, I, and D operations use different deviation
values according to the characteristics of each control actions. The expression of PID
control is as following;
+
+
=
∫
t
dt
dEd
Td
ds
s
Ei
Ti
Ep
K
MV
0
)
(
1
MV
: Manipulate value
K
: Proportional gain
Ti
: Integral time
Td
: Derivative time
Ep
: Deviation value for proportional action
Ei
: Deviation value for integral action
Ed
: Deviation value for derivative action
The deviation values of P, I, and D action is described as following equations;
PV
Ed
PV
SV
Ei
PV
SV
b
Ep
−
=
−
=
−
×
=
The b of the first equation is called as reference value. It can be varied according to
the load disturbance of measurement noise.
Fig. 2-10 Diagram of simple feedback system
Process
-1
+
SV
PV
MV
PID
controller







































































