





























Chapter 15. The PID functions
15-11
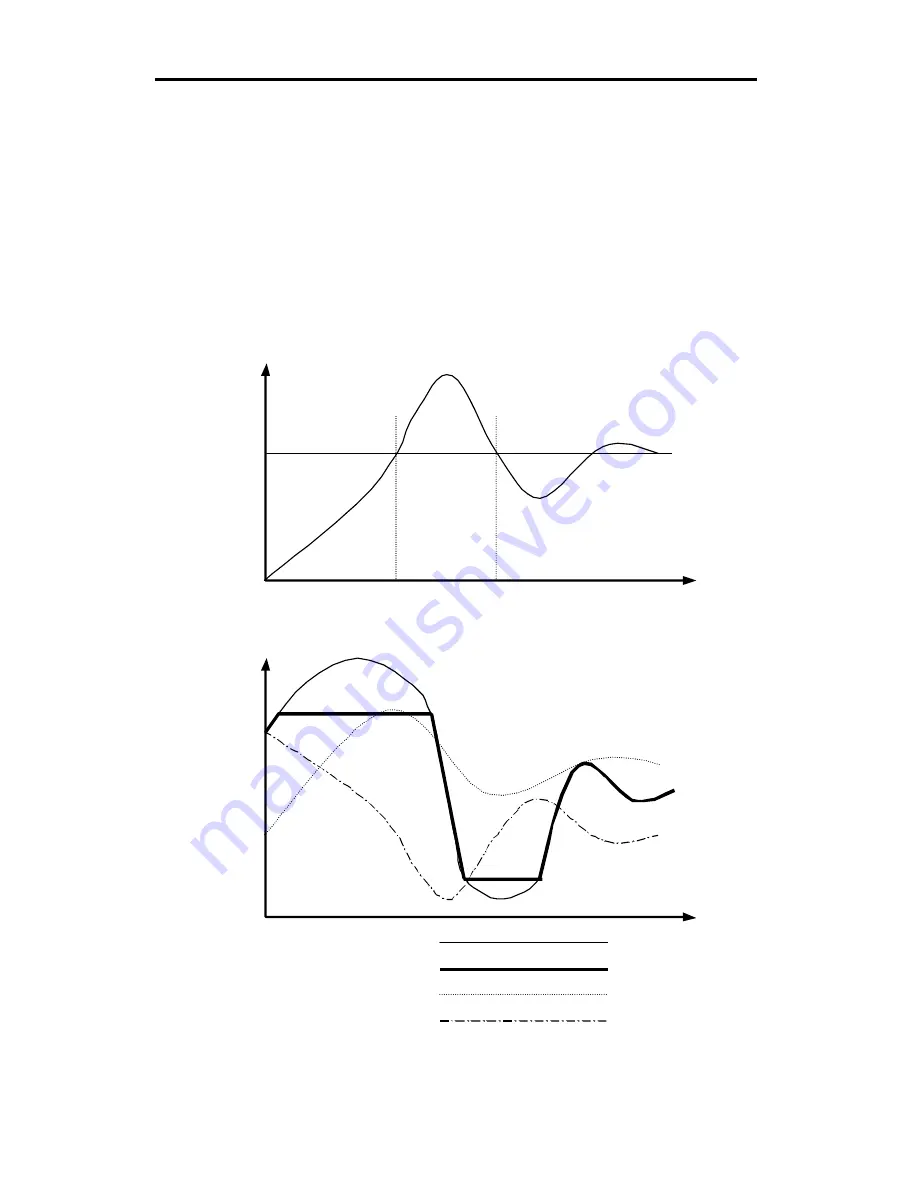
The Fig. 2-12 shows the PV and MV of PI control system when the windup occurs. As
shown as the Fig. 2 -12, the actuator is saturated because of the large initi al deviation.
The integral term increase until the PV reaches to the SV (deviation = 0), and then
start to decrease while the PV is larger than SV (deviation < 0). However, the MV
keeps the saturated status until the integral term is small enough to cancel the windup
of actuator. As the result of the windup, the actuator will output positive value for a
while after the PV reached to the SV, and the system show a large overshoot. A large
initial deviation, load disturbance, or mis-operation of devices can cause windup of
actuator.
M V
S V
T i m e
P V
S V
T i m e
P V
M V ( w i t h o u t w i n d u p )
M V ( w i t h w i n d u p )
I n t e g r a l t e r m
Proportional term







































































