





























Chapter 3 – Function Setting
48
Operation
Example (3)
2
nd
motor operation
[Operation condition]
-. Control mode: V/F control
-. 1
st
motor + 2
nd
motor Operation by exchange using [2
nd
Func] (Values can be set differently)
-. Frequency command: Using Multi-step operation
(1
st
motor --- 50[Hz] as main speed, 2
nd
motor --- 20[Hz] with P1 terminal set as multi- step operation)
-. Accel/Decel time: 1
st
motor --- Accel time: 15[Sec], Decel time: 25 [Sec]
2
nd
motor --- Accel time: 30[Sec], Decel time: 40 [Sec]
-. Drive mode: Run/Stop via FX/RX
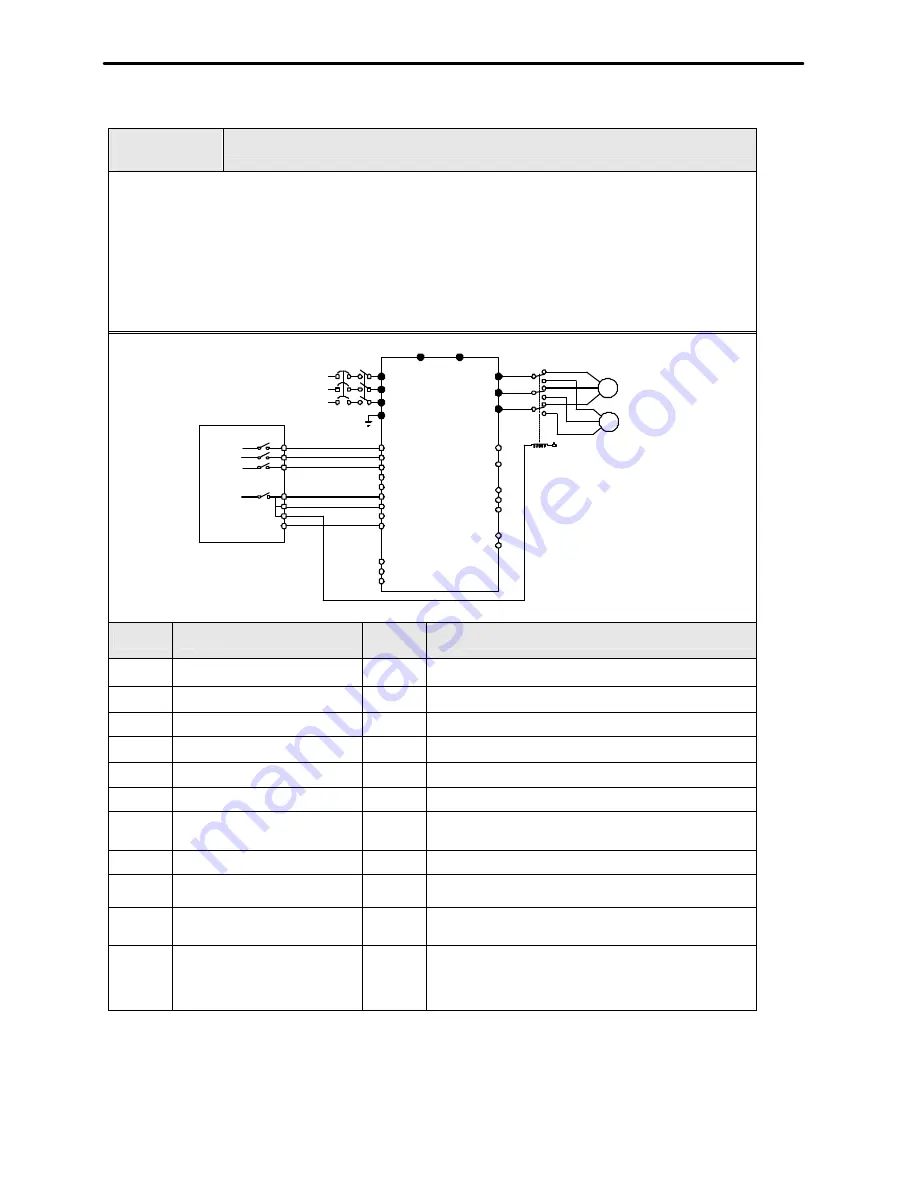
[Wiring]
R
S
T
G
U
V
W
B1
B2
FX
RX
BX
RST
JOG
P1
P2
P3
CM
VR
V1
5G
FM
5G
30A
30C
30B
AXA
AXC
IM 1st motor
3P
AC
input
IM
2nd
motor
1st /2nd motor
Switch-over
FX
RX
BX
CM
1st / 2nd
motor
select
Step
Parameter setting
Code
Description
1
Control Mode Selection
FU2-39 Set it to 0 {V/F}.
2
Drive mode
DRV-3
Set it to Fx/Rx-1.
3
Frequency Mode setting
DRV-4
Set it to 0 {keypad-1}. 1
st
motor freq setting
4
Multi-function input terminal P2
I/O-13
Set P2 to 2nd Func.
5
Multi-function input terminal P1
I/O-12
Set P1 to Speed-L. 2
nd
motor freq setting
6
Freq setting for 1
st
motor
DRV-0
Set it to 50[Hz].
7
Accel/Decel time setting for 1
st
motor
DRV-1,
DRV-2
Set Accel/Decel time to 15[sec]/25[sec].
8
Freq setting for 2
nd
motor
DRV-5
Set it to 10[Hz].
9
Accel/Decel time setting for 2
nd
motor
FU2-81/82 Set Accel/Decel time to 30[sec]/50[sec].
10
1
st
motor operation
Set it as main motor by turning P1, P2, output relay OFF.
Run the motor in FWD/REV direction using FX/RX terminal.
11
2
nd
motor operation
Set 2
nd
motor parameters by turning terminal P2 ON.
Change the freq setting to 20[Hz] by turning terminal P1 ON.
Change 2
nd
motor terminal by turning output relay ON.
Run the motor in FWD/REV direction by terminal FX/RX.
Morek IT OÜ, Rauna 24, 76506 Saue Harjumaa, Estonia. www.morek.eu Tel. +372 604 1423 Fax +372 604 1447 morek@morek.eu







































































