





























Chapter 5 - Parameter List
72
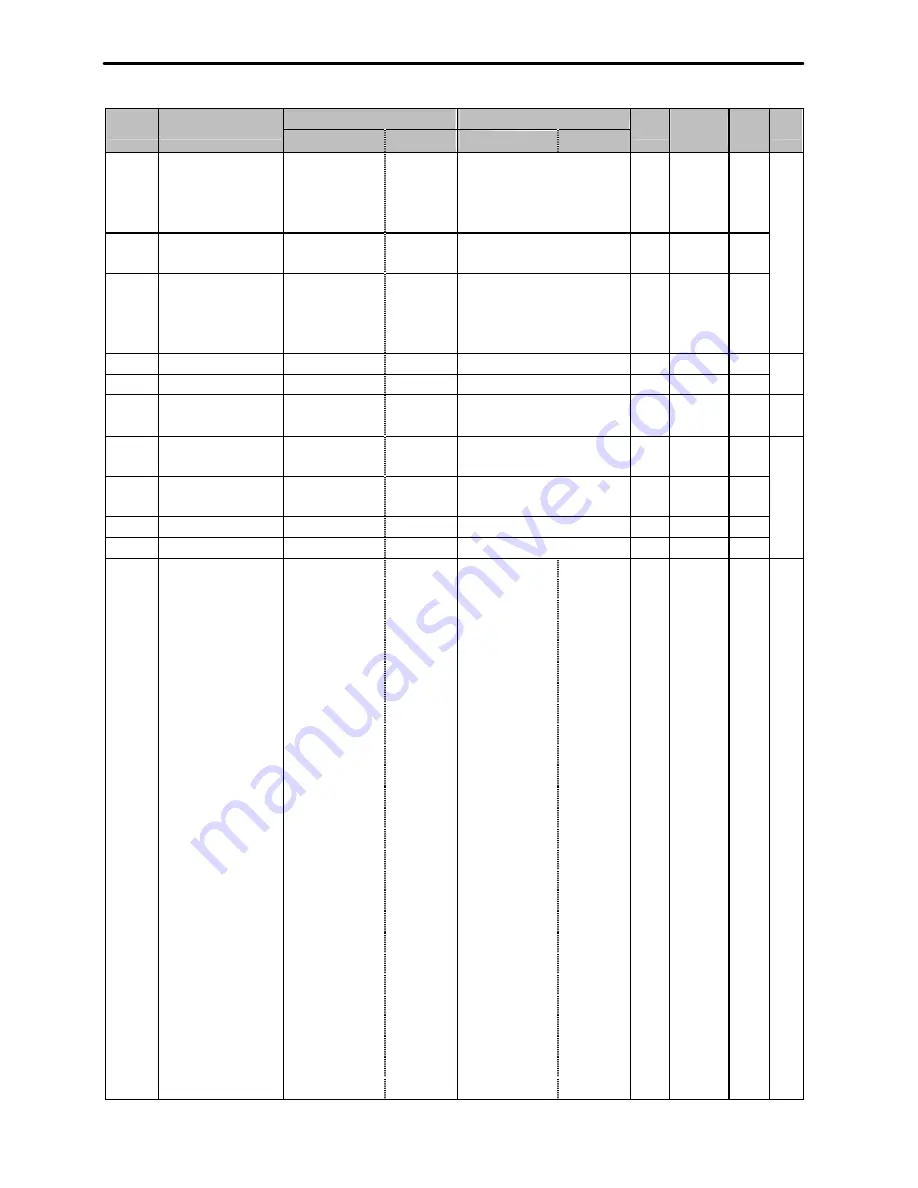
Keypad Display
Setting Range
Code
Description
LCD
7-Segment
LCD
7-Segment
Units
Factory
Default
Adj.
During
Run
Page
EXT-19
Frequency Output
Corresponding to Pulse
Input Minimum
Frequency
F freq y1
19
0 to FU1-20
0.01
0.00 [Hz]
Yes
EXT-20
Pulse Input Maximum
Frequency
F pulse x2
20
0 to 100 [kHz]
0.01 10.00 [kHz] Yes
EXT-21
Frequency Output
Corresponding to Pulse
Input Maximum
Frequency
F freq y2
21
0 to FU1-20
0.01 60.00 [Hz] Yes
139
EXT-22
P-Gain for ‘Sub-B’
PG P-gain
22
0 to 9999
1
3000
Yes
EXT-23
I-Gain for ‘Sub-B’
PG I-gain
23
0 to 9999
1
50
Yes
140
EXT-24
Slip Frequency for
‘Sub-B’ Board
PG Slip Freq
24
0 to 200 [%]
1
100 [%]
Yes
140
EXT-25
P-Gain for
(Sensored) Vector_SPD
ASR P-Gain
25
10 to 500 [%]
0.1
100.0 [%]
Yes
EXT-26
I-Gain for
(Sensored) Vector_SPD
ASR I-Gain
26
10 to 9999 [ms]
1
200 [ms]
Yes
EXT-27
Forward Torque Limit
Trq + Limit
27
0 to 200 [%]
1
180 [%]
Yes
EXT-28
Reverse Torque Limit
Trq - Limit
28
0 to 200 [%]
1
180 [%]
Yes
-
FDT-1
0
FDT-2
1
FDT-3
2
FDT-4
3
FDT-5
4
OL
5
IOL
6
Stall
7
OV
8
LV
9
OH
10
Lost Command
11
Run
12
Stop
13
Steady
14
INV line
15
COMM line
16
Ssearch
17
Step pulse
18
Seq pulse
19
Ready
20
Trv. ACC
21
Trv. DEC
22
MMC
23
Zspd Dect
24
EXT-30
Multi-Function Output
Terminal ‘Q1’ Define
Q1 define
30
Torq Dect
25
-
FDT-1
Yes
140
Morek IT OÜ, Rauna 24, 76506 Saue Harjumaa, Estonia. www.morek.eu Tel. +372 604 1423 Fax +372 604 1447 morek@morek.eu







































































