




























April 17, 2000
Man ual Versio n 1.0
3.11
NOTE:
The cable should remain unbroken except for the connector in this junction box to
keep the shield integrity - do not splice the cable!
b) It may be necessary to order a transducer longer than the slide adjustment range because of
mounting limitations.
c) Ferromagnetic material (a material readily magnetized - such as iron or steel) should be no closer
than .25" from the magnet or the rod end. This includes ferrous screws! Non-ferrous metals
such as aluminum, brass, and non-magnetic stainless can be in direct contact with the magnet or
rod end.
d) Transducers longer than 30" may need special supports and split magnets.
e) The rod of the transducer is typically four to five inches longer than the specified length due to
“dead zone” and “null zone” areas at the beginning and end of the rod.
f) The cable from the transducer to the OmniLink 5000 should not be run with any high voltage
wiring (i.e. 120/240 VAC). In fact, the cable should be run in its own shielded conduit.
g)
Read
the manufacturers instructions
that came with the transducer for other possible issues
and mounting considerations.
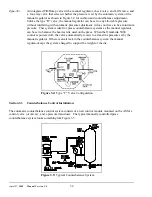
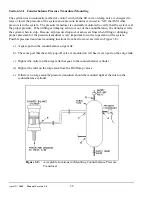
Section 3.6.4 Linear Transducer Slide Adjust Wiring
A cable must go from the linear transducer mounted on the slide to the auto-setup board in the 5000
extended card rack. Since the slide goes up and down relative to the machine, some means of stress
relief must be used on the cable between the slide and the machine frame. The recommended method is
to use a helical cable (same principle as a telephone handset cord) from the transducer to a junction box
on the bottom of the crown. This lets the wire run in a “spring” pattern to help it resist breaking.
Appendix B, Figure B.6 shows a conceptual view of this type of mounting. The junction box should be
grounded to the machine to help shield the connections inside.
Slide adjust motor starters with and without auxiliary contactors are supported by the OmniLink shut
height system as are solenoid operated valves for air motor operation. Refer to appendix “B” for typical
wiring diagrams. Figures B.7 and B.8 show the wiring for two supported linear transducers. Figures
B.9 and B.10 show the wiring of slide adjust motor starters with and without auxiliary contactors.
Figure B.11 shows the wiring of a slide adjust air motor.
If you order an OmniLink 5000 control with a slide adjust system, a wiring diagram will be provided
as part of the documentation package.
Summary of Contents for OmniLink 5000
Page 5: ...April 17 2000 Manual Versio n 1 0 iv...
Page 38: ...April 17 2000 Manual Versio n 1 0 4 14...
Page 63: ...April 17 2000 Manual Versio n 1 0 B 2 Figure B 2 Typical Cushion Wiring Diagram...
Page 64: ...April 17 2000 Manual Versio n 1 0 B 3 Figure B 3 Conceptual Dual Resolver Mounting...
Page 65: ...April 17 2000 Manual Versio n 1 0 B 4 Figure B 4 Typical AMCI Dual Resolver Wiring Diagram...
Page 66: ...April 17 2000 Manual Versio n 1 0 B 5 Figure B 5 Typical GEMCO Dual Resolver Wiring Diagram...
Page 67: ...April 17 2000 Manual Versio n 1 0 B 6 Figure B 6 Conceptual Linear Transducer Mounting...
Page 68: ...April 17 2000 Manual Versio n 1 0 B 7 Figure B 7 Typical GEMCO Linear Transducer Wiring...
Page 71: ...April 17 2000 Manual Versio n 1 0 B 10...







































































