





























Installation Guide Linear Rotary Motors
ENG
Page 16 / 34
PR02-88
NTI AG / LinMot
6 Start-up
Please note that motors of the PR02-88 family are only fully supported from LinMot-Talk
version 6.8 onwards. It is therefore strongly recommended not to use an older LinMot-Talk
version.
6.1 Linear Motor and Rotary Motor
Linear motor and rotary motor are electrically independent units. The linear rotary motor can therefore be
commissioned sequentially. It does not matter which motor (linear motor or rotary motor) is commissioned
first.
The various parameters for the linear motor and the rotary motor are set on the drive side using the
corresponding wizard in the LinMot Talk configuration program.
Do not drive into the internal mechanical stops!
It must always be ensured that the linear motor never moves into the lower or upper internal
stop during operation, as otherwise the linear rotary motor may be damaged! The inner
stops may be used for homing purposes; the homing speed must not exceed 0.01 m/s.
6.2 Default Values of the Coordinate System
6.2.1 Angle of Rotation
Looking into the shaft, the counterclockwise
counting direction of the rotation angle is defined as
positive.
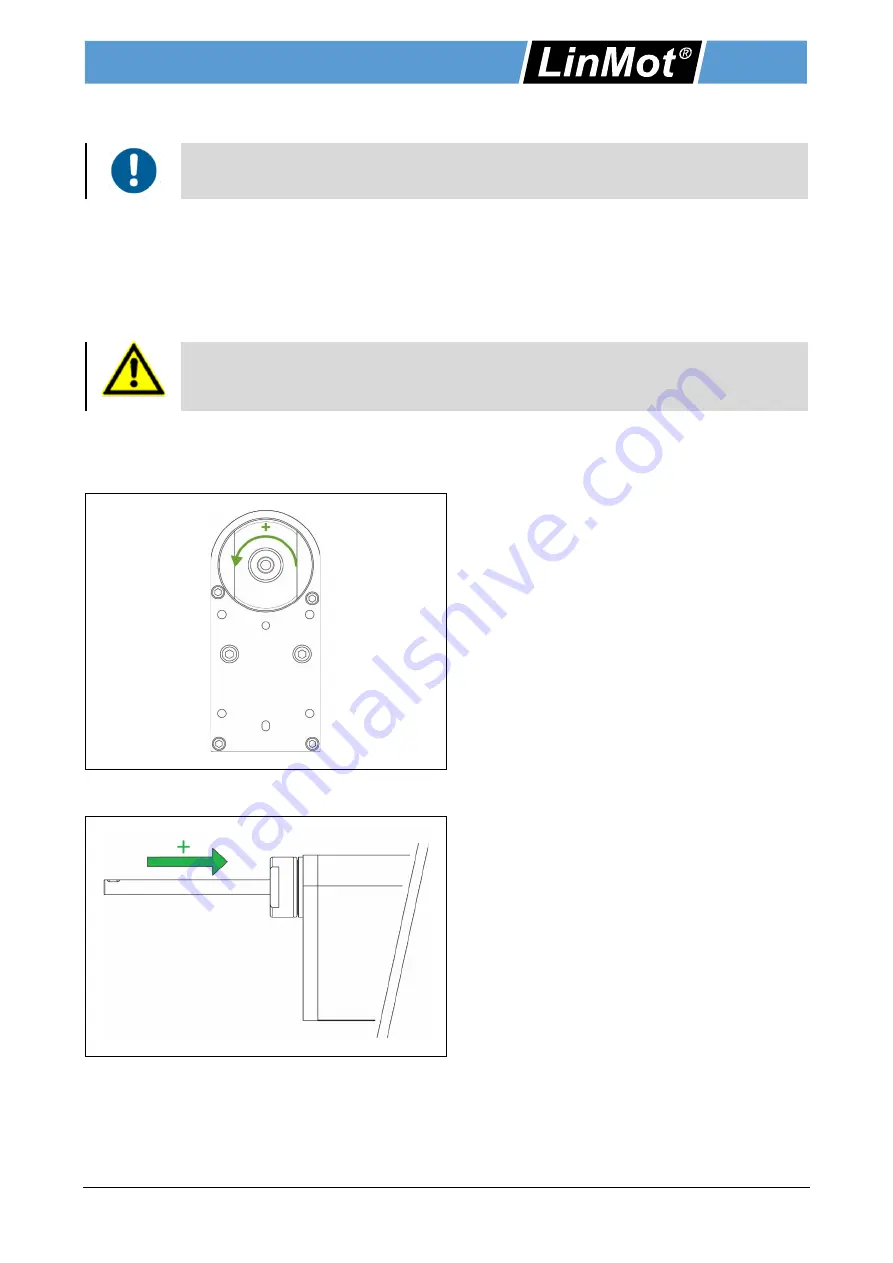
6.2.2 Position
With regard to the motor, the positive counting
direction of the position is defined by retracting the
linear rotary shaft.







































































