





























Operating Manual
- Page 29 -
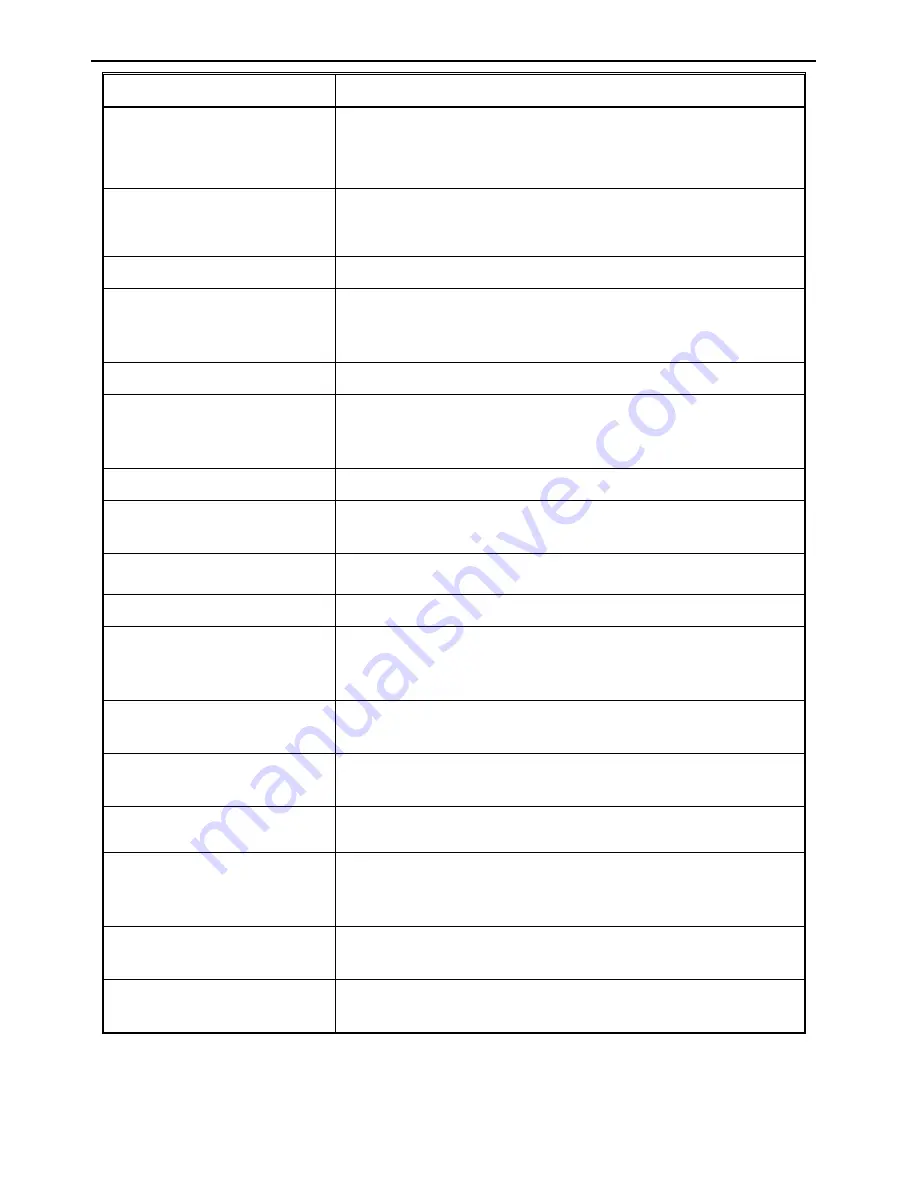
Function Description
Retract Setup
Registers Retract values at the current XYZ location. Retract
causes the tip to move up and back over the dispensed bead
after line dispensing.
Quickstep
Causes the robot to move very fast from one point to another
reducing the time of the dispensing cycle.
Auto Purge Setup
Automatically purges the system at the end of the program.
ESTOP Output Status
After receiving the emergency stop signal, ESTOP Output
Status can modify the status of all the outputs or leave them as
before receiving the emergency signal.
Acceleration
Parameter that controls the robot’s acceleration
Pause Status
Sets the position to which the tip moves after pressing the
Start button. The tip can go to the Home position or will stay
at the position where the Start button was pressed.
Language
Opens MENU for selecting the Language.
Jog Speed
Allows the user to set the tip jog speed for teach mode: Low,
Middle or High jog speed can be selected.
Debug Speed (mm/s)
Sets the speed used when running in Debug mode.
Adjust Origin
See Section 7.4.9 “Adjust Position Setup”.
Quickstep Path
To setup the move up shape of Z-axis. “Triangle Shape” or
“Normal Shape” .
Need to use with function “Quickstep”.
USB Up/Down Load
Upload and Download program files via USB port.
See Section 7.4.21
Circle Delay Time
Set up dispensing delay time if used over angle at Circle
command.
Initialize Setup
Allow machine to perform HOMING at each cycle.
Teach Needle Adjustment
Allow the user to set up the location of needle calibration
tools.
See Section 7.4.24
Needle Adjustment Setup
Setup Needle calibration method and calibrate repeat times.
See Section 7.4.25
Double Table Run Mode
To define the run mode of dual-table.
See Section 7.4.26
Summary of Contents for EQ RB20 500D
Page 5: ...Operating Manual Page 5 SECTION 1 Introduction ...
Page 8: ...Operating Manual Page 8 SECTION 2 Setup ...
Page 10: ...Operating Manual Page 10 SECTION 3 Tour of Robot ...
Page 12: ...Operating Manual Page 12 SECTION 4 Tour of Teach Pendant ...
Page 21: ...Operating Manual Page 21 SECTION 5 MENU Introduction ...
Page 30: ...Operating Manual Page 30 SECTION 6 Programming ...
Page 39: ...Operating Manual Page 39 SECTION 7 Function Reference ...
Page 98: ...Operating Manual Page 98 SECTION 8 Sample Programs ...
Page 107: ...Operating Manual Page 107 SECTION 9 Software Upgrade ...
Page 109: ...Operating Manual Page 109 SECTION 10 Error Messages and Specifications ...
Page 119: ...Operating Manual Page 119 SECTION 11 Maintenance Accessories Spare Parts ...
Page 124: ...Operating Manual Page 124 SECTION 12 Equipment Warranty ...































































