





























Operating Manual
- Page 81 -
After the tip raises the length specified by
L. Length
at the speed specified by
L. Speed
, the tip will
continue rising to the
Z Clearance
height at the speed specified by
H. Speed
.
The purpose of specifying a Z Clearance height is to allow the tip to raise high enough to clear any
obstacles it may encounter on the way to the next point.
Values for
H. Speed
,
L. Speed
and
L. Length
are registered with the
Dispense End Setup
function by
pressing the
F4
key, then choosing
Dispense End Setup
.
Once
Dispense End Setup
values have been registered at a memory address, all points after that
memory address will use the values specified. If
Dispense End Setup
values are registered again, at
a higher memory address, all points from that memory address forward will use the new values.
Please see
SECTION 8: Sample Programs
for an example of the
Dispense End Setup
instruction.
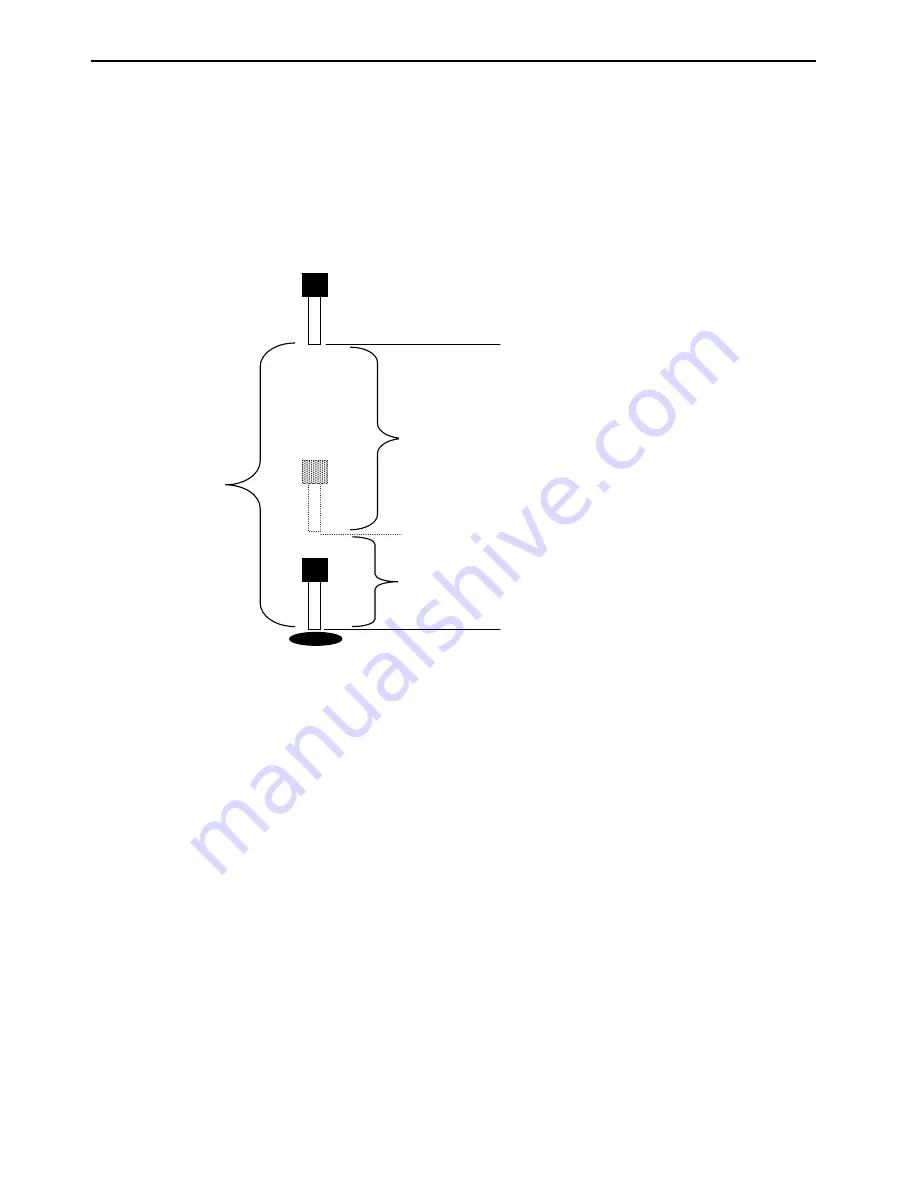
H. Speed
2: Tip continues rising to
Z Clearance
height at
H. Speed
L. Length
1: After dispensing, the tip
rises to
L. Length
at
L. Speed
Z Clearance
Summary of Contents for EQ RB20 500D
Page 5: ...Operating Manual Page 5 SECTION 1 Introduction ...
Page 8: ...Operating Manual Page 8 SECTION 2 Setup ...
Page 10: ...Operating Manual Page 10 SECTION 3 Tour of Robot ...
Page 12: ...Operating Manual Page 12 SECTION 4 Tour of Teach Pendant ...
Page 21: ...Operating Manual Page 21 SECTION 5 MENU Introduction ...
Page 30: ...Operating Manual Page 30 SECTION 6 Programming ...
Page 39: ...Operating Manual Page 39 SECTION 7 Function Reference ...
Page 98: ...Operating Manual Page 98 SECTION 8 Sample Programs ...
Page 107: ...Operating Manual Page 107 SECTION 9 Software Upgrade ...
Page 109: ...Operating Manual Page 109 SECTION 10 Error Messages and Specifications ...
Page 119: ...Operating Manual Page 119 SECTION 11 Maintenance Accessories Spare Parts ...
Page 124: ...Operating Manual Page 124 SECTION 12 Equipment Warranty ...






































































