





























3DM
®
-GX5-35
DCP Manual
4.2.15
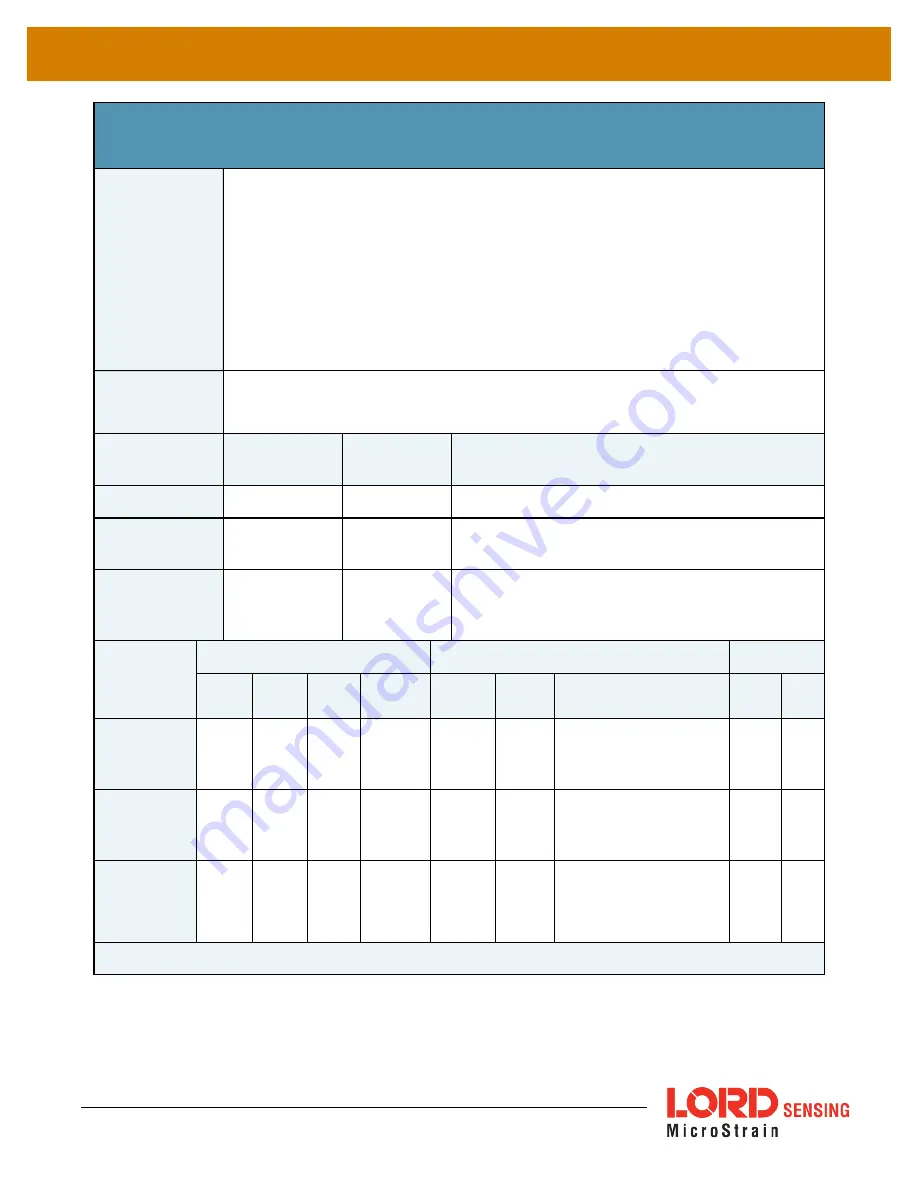
Capture Gyro Bias (0x0C, 0x39)
Description
This command will cause the 3DM-GX5-35 to sample its sensors for the specified number
of milliseconds. The resulting data will be used to initialize its orientation, and to estimate
its gyro bias error. The estimated gyro bias error will be automatically written to the Gyro
Bias vector. The bias vector is not saved as a startup value. If you wish to save this
vector, use the
command.
Possible sampling time values:
Total
sampling
time
in
units
of
milliseconds.
Range
of
values:
1000
to
3
0
000.
Notes
Note: The 3DM-GX5-35 must be stationary during the execution of the Capture Gyro Bias
operation.
Field Format
Field Length
Field
Descriptor
Field Data
Command
0x04
0x39
U16 – Sampling Time (milliseconds)
Reply Field 1:
ACK/ NACK
0x04
0xF1
U8 - echo the command byte
U8 - error code (0: ACK, non-zero: NACK)
Reply Field 2:
Function = 2
0x0E
0x9B
float - Current X Gyro Bias Value
float - Current Y Gyro Bias Value
float - Current Z Gyro Bias Value
Examples
MIP Packet Header
Command/Reply Fields
Checksum
Sync1
Sync2
Desc.
Set
Payload
Length
Field
Length
Field
Desc.
Field Data
MSB
LSB
Command:
Capture
Gyro Bias
0x75
0x65
0x0C
0x04
0x04
0x39
Sampling Time: 0x2710
0x5E
0xE0
Reply Field
1:
ACK/NACK
0x75
0x65
0x0C
0x04
0x04
0xF1
Echo cmd: 0x39
Error code: 0x00
Reply Field
2: Bias
Vector
0x0E
0x9B
Field (Bias): 0x00000000
0x00000000
0x00000000
0xCF
0x19
Copy-Paste version of the command: “7565 0C04 0439 2710 5EE0”
55







































































