

























A quadrocopter controls its direction of flight by varying the ro-
tation speed of its 4 rotors. Due to the different rotation speed
the rotors generate different ascending forces and the model
flies in the appropriate direction. For example: If you issue the
Gravit the signal to fly fowards (by pushing the throttle stick
forwards), the Gavit evenly increases the rotation speed of its
two rear rotors. By doing so, the two rear rotors generate a
stronger ascending force than the two front ones and therefore
your Gravit pitches forward and flies in the correspondent
direction.
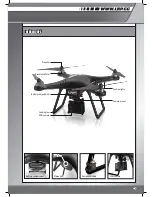
QUADROCOPTER MOVEMENT
Movement around vertical axis = Yaw
Movement around lateral axis = Pitch
Movement around longitudinal axis = Roll
FUNCTIONALITY OF A QUADROCOPTER
Vertical axis
(= Yaw)
Longitudinal axis
(= Roll)
Lateral axis
(= Pitch)
11




























































