



























4. Parameters
4-52
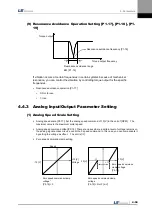
4.4
Parameter Setting
4.4.1
System Parameter Setting
1.
Motor ID setting [P0-00]
Serial encoder: Reads the motor ID from the encoder and displays it.
Incremental encoder: Sets motor ID directly.
2.
Encoder setting
Encoder type [P0-01]
Numb
er
Encoder Type
Encoder Type
0
Quadrature type
incremental encoder
1
Serial type encoder (-)
2
Serial type Abs encoder (12 bit)
3
Serial type Abs encoder (16 bit)
4
Serial type Abs encoder (20 bit)
5
Serial type Abs encoder (24 bit)
※
The bits in parentheses in the previous table indicate peak multi-turn data.
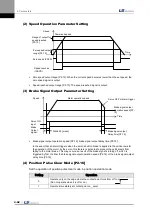
Encoder pulse [P0-02]
Set this pulse when using an incremental encoder. Set the number of pulses per turn for a
signal. For a serial encoder, encoder data are set directly.
3.
Operation mode setting [P0-03]: Sets operation mode of the servo.
Operation Mode
Operation Method
0
Torque control operation
1
Speed control operation
2
Position control operation
3
Mode contact ON: Position control operation
Mode contact OFF: Speed control operation
4
Mode contact ON: Speed control operation
Mode contact OFF: Torque control operation
5
Mode contact ON: Position control operation
Mode contact OFF: Torque control operation
4.
System ID setting
An ID can be given to the servo if RS422 communication and BUS communication are used for
communication with the servo. Communication-related options are required in this case.
Communication speed setting [P0-04]
You can select the baud rate, the communication speed of RS422.
0: 9600 [bps]
1: 19200 [bps]
2: 38400 [bps]
3: 57600 [bps]
Summary of Contents for L7 A001
Page 1: ...VER 1 5...
Page 2: ......
Page 32: ...1 Product Components and Signals 1 20...
Page 38: ...2 Installation 2 6...
Page 54: ......
Page 188: ...7 Product Specifications 7 26 L7 A020 L7 A035 Weight 2 5 kg cooling fan included...
Page 210: ...8 Maintenance and Inspection 8 14...
Page 211: ...9 Appendix 9 1 9 Appendix...
Page 218: ...9 Appendix 9 8...
Page 221: ......
Page 222: ......







































































