



























4. Parameters
4-56
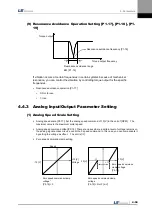
(2)
Position Control Gain
Position command: Count the position command pulse input from outside, and then apply an
electric gear ratio, and then through [P1-03] position command filter, use it as an internal position
command. In the case that Numerator of electric gear is bigger, a change of external input position
command pulse influences on a change of internal position command. And this influence is getting
bigger. So there is need to adjust ‘[P1-03] position command filter time constant’
Current position: Count pulse signals received from the encoder and convert them to current
position by using electronic gear ratio settings.
Position proportional gain [P1-01] and [P1-02]: Convert the difference between the position
command and the current position into a speed command by multiplying it by position proportional
gain.
* Recommended value = speed proportional gain [P1-06] / 10
Feedforward gain [P1-04]: Calculate the gradient with the differential value of the position command.
Reduce time to target position by adding the speed command to the gradient. If the resultant
value is too big, overshooting or instability might occur in position control. Therefore, it is important
to gradually increase the value from a small value while watching the test drive.
Feedforward filter [P1-05]: If position commands change too drastically, the feedforward control
filter vibrates. In this case, remove the vibration by setting a filter value.
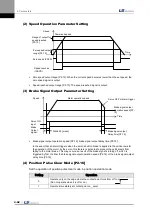
(3)
Speed Control Gain
Speed command: Use an analog speed signal entering from outside as a speed command after
running it through the speed command filter [P1-10], or use a digital speed command and [RPM]
set in the internal parameter.
Current speed: Calculate speed by counting encoder signals as time progresses, and use the
calculated speed as the current speed after running it through a filter. An algorithm, which projects
speed by using the current torque and inertia, is used to make up for the errors occurring during
Analog
speed
command
Speed command
filter time constant
[P1- 10]
Speed integral
time constant
[P1-08]
Speed
Proportional Gain
[P1-06]
Speed calculation
Encoder signal
Torque command
Current speed
Digital speed command
+
+
Current torque
-
Speed feedback filter
time constant [P1-11]
Differ
entiati
on
FF filter time
constant
[P1-05]
Feedforward gain
[P1-04]
Current position
Proportional
gain
[P1-01]
Position error
+
-
+
+
Speed
Command
Position
command
Pulse output
Prescale
[P0-14]/[P0-15]
Summary of Contents for L7 A001
Page 1: ...VER 1 5...
Page 2: ......
Page 32: ...1 Product Components and Signals 1 20...
Page 38: ...2 Installation 2 6...
Page 54: ......
Page 188: ...7 Product Specifications 7 26 L7 A020 L7 A035 Weight 2 5 kg cooling fan included...
Page 210: ...8 Maintenance and Inspection 8 14...
Page 211: ...9 Appendix 9 1 9 Appendix...
Page 218: ...9 Appendix 9 8...
Page 221: ......
Page 222: ......







































































