





























6. Communication Protocol
6-11
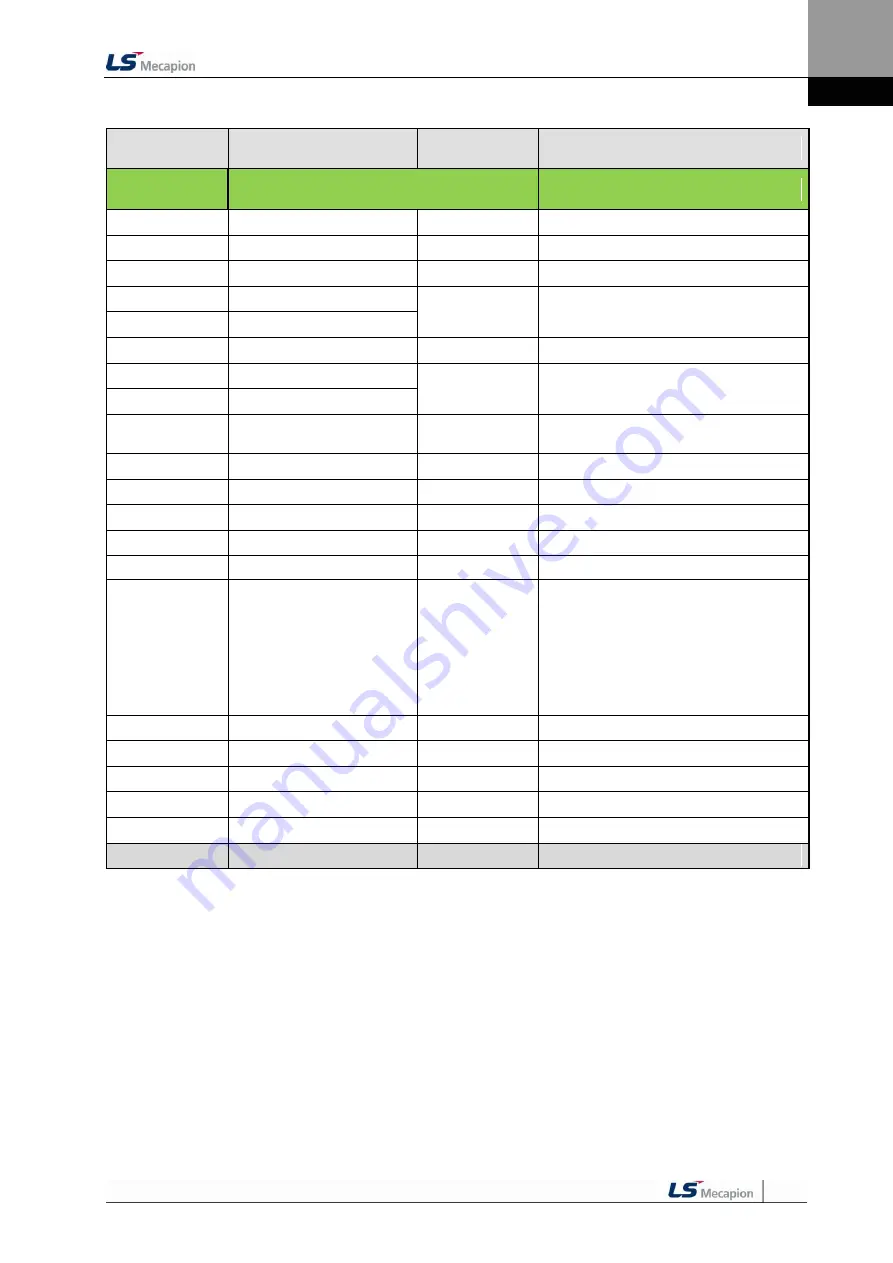
Communication
Address
Parameter Name
Parameter
Number
Material Type
(Decimal
Number)
Operation Status Display Parameter
34
Regenerative overload
St - 13
UINT16
36
Input contact status
St - 14
UINT16
38
Output contact status
St - 15
UINT16
40
Single-turn data - L
St - 16
INT32
42
Single-turn data - H
44
Single-turn data (degrees)
St - 17
UINT16
46
Multi-turn data - L
St - 18
INT32
48
Multi-turn data - H
50
Temperature in the servo
drive
St - 19
UINT16
52
Rated motor speed
St - 20
UINT16
54
Maximum motor speed
St - 21
UINT16
56
Rated motor current
St - 22
UINT16
58
Phase U current offset
St - 23
INT16
60
Phase V current offset
St - 24
INT16
62
Software version
St - 25
UINT16
BIT0-BIT4: Drive capacity
(1: 100W, 2: 200W, 3: 400W, 4: 750W, 5:
1kW, 6: 3.5kW)
BIT5-BIT14: Version number
BIT 15: Encoder type
(0: Quadrature, 1: Serial)
64
FPGA version
St - 26
UINT16
66
Analog torque command
St-27
UINT16
68
Reserved
Summary of Contents for L7 A001
Page 1: ...VER 1 5...
Page 2: ......
Page 32: ...1 Product Components and Signals 1 20...
Page 38: ...2 Installation 2 6...
Page 54: ......
Page 188: ...7 Product Specifications 7 26 L7 A020 L7 A035 Weight 2 5 kg cooling fan included...
Page 210: ...8 Maintenance and Inspection 8 14...
Page 211: ...9 Appendix 9 1 9 Appendix...
Page 218: ...9 Appendix 9 8...
Page 221: ......
Page 222: ......







































































