

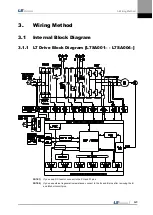
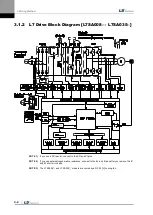
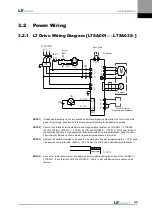






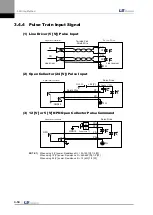















3. Wiring Method
3-13
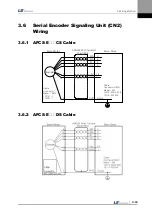
3.6
Serial Encoder Signaling Unit (CN2)
Wiring
3.6.1
APCS-E
CS Cable
Encoder
1
2
3
4
7
8
9
MA
SL
/SL
+5V
GND
SHD
3
4
5
6
14
7
Frame
Servo Drive
Servo Motor
AWG24 4Pair Twisted
Shield Wire
Cable
Connector
Maker - AMP
172161-1
170361-1
Cable
Connector(CN2)
Maker
–
3M
10314-52A0-008
10114-3000VE
/MA
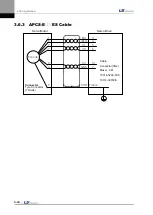
3.6.2
APCS-E
DS Cable
Summary of Contents for L7 A001
Page 1: ...VER 1 5...
Page 2: ......
Page 32: ...1 Product Components and Signals 1 20...
Page 38: ...2 Installation 2 6...
Page 54: ......
Page 188: ...7 Product Specifications 7 26 L7 A020 L7 A035 Weight 2 5 kg cooling fan included...
Page 210: ...8 Maintenance and Inspection 8 14...
Page 211: ...9 Appendix 9 1 9 Appendix...
Page 218: ...9 Appendix 9 8...
Page 221: ......
Page 222: ......







































































