





























4. Parameters
4-34
4.2.4
Control Setting Parameter
For detailed information, refer to "4.4.2 Control Parameter Setting."
“**” Modification is not possible with the servo on & Power reset parameter.
“*” Parameter that cannot be modified with the servo on
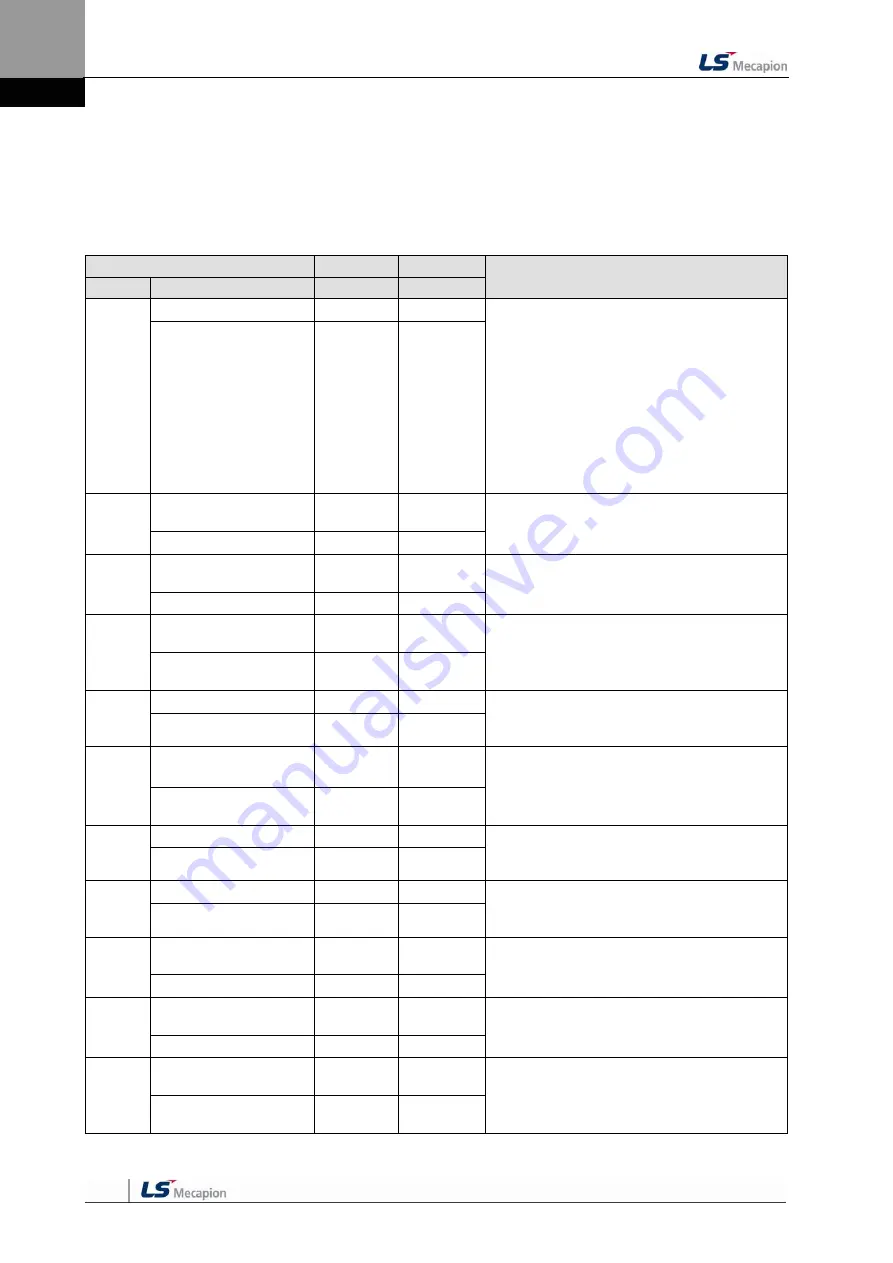
Parameter
Unit
Initial
Details
Code
Name
Minimum
Maximum
P1-00
Inertia ratio
[%]
100
Sets inertia ratio for load.
Inertia ratio is considered 100 percent when
there is no load from the motor. Because
setting inertia ratio against load is an important
control parameter for the operation of the
servo, inertia ratio shall be set by calculating
load inertia by the machine system and rotor
inertia from the motor specification table.
Setting an accurate inertia ratio is crucial for
optimal servo operation.
(Detai
ls: Refer to “4.4.2 Control Parameter
Setting.”)
Inertia ratio
0
20000
P1-01
Position proportional gain
1
[Hz]
50
Sets position control proportional gain 1.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Position P gain 1
0
500
P1-02
Position Proportional Gain
2
[Hz]
70
Sets position control proportional gain 2.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Position P gain 2
0
500
P1-03
Position command filter
time constant
[ms]
0
Sets filter time constant for internal position
command which is reflected by electric gear ratio.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Pos. command filter time
constant
0
1000
P1-04
Position feedforward gain
[%]
0
Sets position feedforward control ratio.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Pos. feedforward gain
0
100
P1-05
Position feedforward
Filter time constant
[ms]
0
Sets position feedforward control filter time
constant.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Pos. feedforward time
constant
0
1000
P1-06
Speed proportional gain 1
[rad/s]
400
Sets speed control proportional gain 1.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Speed P gain 1
0
5000
P1-07
Speed proportional gain 2
[rad/s]
700
Sets speed control proportional gain 2.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Speed P gain 2
0
5000
P1-08
Speed integral time
constant 1
[ms]
50
Sets speed control integral time constant 1.
(Details: Refer to “4.4.2 Control Parameter
Setting.”)
Speed time constant 1
1
1000
P1-09
Speed integral time
constant 2
[ms]
15
Sets speed control integral time constant 2.
Speed time constant 2
1
1000
P1-10
Speed command filter
time constant
[ms]
10
Sets filter time constant for speed command
values.
Spd. command filter time
constant
0
1000
Summary of Contents for L7 A001
Page 1: ...VER 1 5...
Page 2: ......
Page 32: ...1 Product Components and Signals 1 20...
Page 38: ...2 Installation 2 6...
Page 54: ......
Page 188: ...7 Product Specifications 7 26 L7 A020 L7 A035 Weight 2 5 kg cooling fan included...
Page 210: ...8 Maintenance and Inspection 8 14...
Page 211: ...9 Appendix 9 1 9 Appendix...
Page 218: ...9 Appendix 9 8...
Page 221: ......
Page 222: ......







































































