





























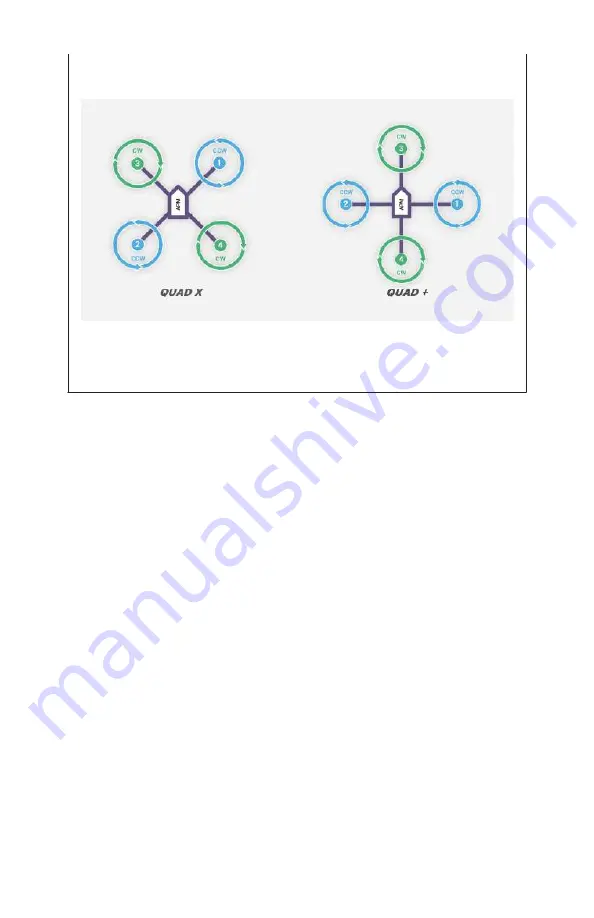
configuration would point directly toward one.
trates this.
Figure 9-8.
Two quadcopters with different configurations, X
and +.
Step 2.2: Calibrate accelerometer
The next substep is to calibrate our accelerometer. This sets a
baseline for the APM to understand what direction is up, down,
and so forth. Mission Planner will ask you to move the drone into
different positions, so be sure you have a nice, clear area on a
level work surface to follow the directions as described. It is
important that you do this on an area that is as level as possible.
If you have one, use a bubble level to confirm that the area you
have selected is not out of level. We often use a small TV table
because it is easy to shim up to level if it’s off a little bit.
Click the Accel Calibration button from the left-hand menu (see
). This will place a single button labeled Calibrate
Accel in the main application window. Click that button and fol-
low the instructions that Mission Planner sets before you. It will
ask you to position your drone in a number of different positions
before pressing any key to continue. Once the process is done,
you will see a notification that the calibration either passed or
failed. The positions it will ask you to use are:
138 Make: Getting Started with Drones
Summary of Contents for Terry Kilby
Page 1: ......
Page 3: ...Make Getting Started with Drones Terry Kilby and Belinda Kilby...
Page 26: ......
Page 90: ......
Page 126: ......
Page 153: ...Figure 9 10 Compass setup Figure 9 11 Compass calibration ArduPilot Mega APM Setup 141...
Page 198: ......





































































