
























12
11. Transferring the Firmware
On delivery, no firmware is installed on the Hexapod Robot Board. The firmware must first be transferred during initial commissioning. This is done via the
Arduino IDE.
The following description shows you the procedure for transferring the firmware. In the following chapters you will transfer different programmes to the Hexapod
Robot Board. The procedure is identical except for the selection of the respective program.
When transferring the firmware, the Hexapod Robot Board must be connected to the power supply (battery)! Make sure that the battery is fully
charged before transferring the firmware or programmes.
a) Installing the driver
Connect the "PRG-M" port of the Hexapod Robot Board to a free USB port on your computer. Windows will now attempt to install a new driver. Typically,
Windows will automatically download and install the drivers from the Internet, since the driver for the "FTDI" USB bridge chip used is available in the Windows
driver download (the computer must be connected to the Internet for this to work).
If this method does not work, refer to the driver manually during installation. The driver is located in the unpacked download bundle, in the "Driver" directory.
After installing the driver, check in the device manager whether the driver for the Hexapod Robot Board has been installed and which COM port number has
been assigned. Then select them in the Arduino IDE.
You can also download the drivers directly from http://www.ftdichip.com .
b) Install Arduino IDE
You can download the latest version of the Arduino IDE from www.arduino.cc. The Arduino IDE is available as "installer version" and as "ZIP archive". Both
versions can be used.
With the installer version, you install the Arduino IDE as you would install any other programmes. With the ZIP version, you must unpack the ZIP archive to the
desired location on your computer after the download. Then start the programme by double-clicking on the file "arduino.exe".
The current firmware version was developed with Arduino version 1.8.3. If there are problems with newer versions, download an older version of the
Arduino IDE from www.arduino.cc and transfer the firmware with it.
Also familiarize yourself with the board and its connectors. An overview of the board can be found in Chapter 19 Figure 79.
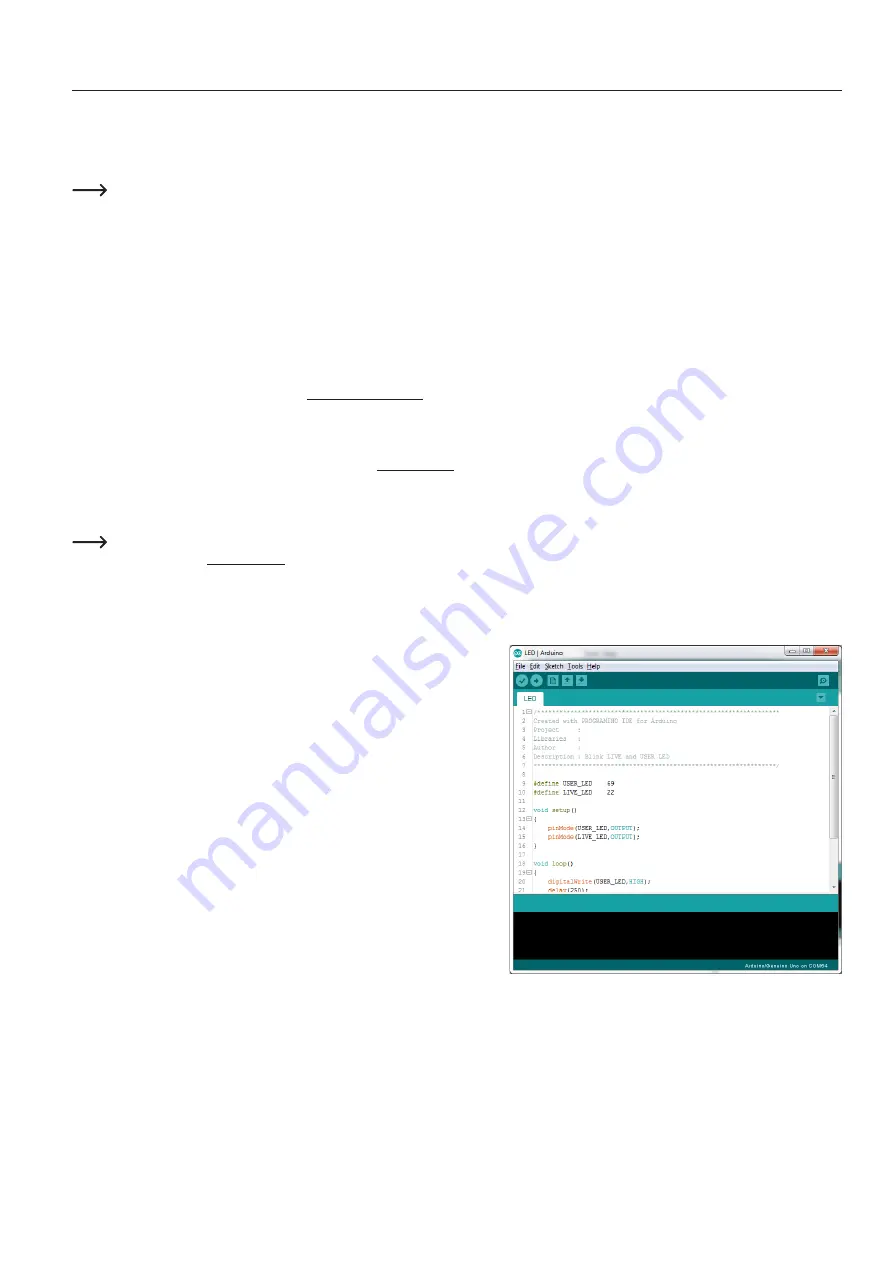
c) Setting up Arduino IDE
Start the Arduino IDE and follow the instructions in this manual.
Figure 8
Summary of Contents for 1664151
Page 1: ...Operating Instructions Hexapod Robobug Complete Set Item no 1664151...
Page 23: ...23 The femur servo mount must be mounted a total of 6 times Figure 31 Figure 32...
Page 26: ...26 Figure 37...
Page 36: ...36 Figure 58 Figure 59...
Page 37: ...37 Figure 60 Illustration_61 Figure 61...
Page 38: ...38 Figure 62...
Page 66: ...66...
Page 67: ...67...
































































