


























17
Functional description of a servo
Servos have electronics, a motor and a potentiometer.
The potentiometer picks up the mechanical position of the servo and forwards it to the
servo electronics.
The electronics in the servo compares the given position (nominal value, in our case
the pulse width given by the locomotion controller) with the pulse width of the servo
electronics (set via the potentiometer, actual value).
If there is a difference between the two pulse widths, the servo electronics regulates
the motor to the target position.
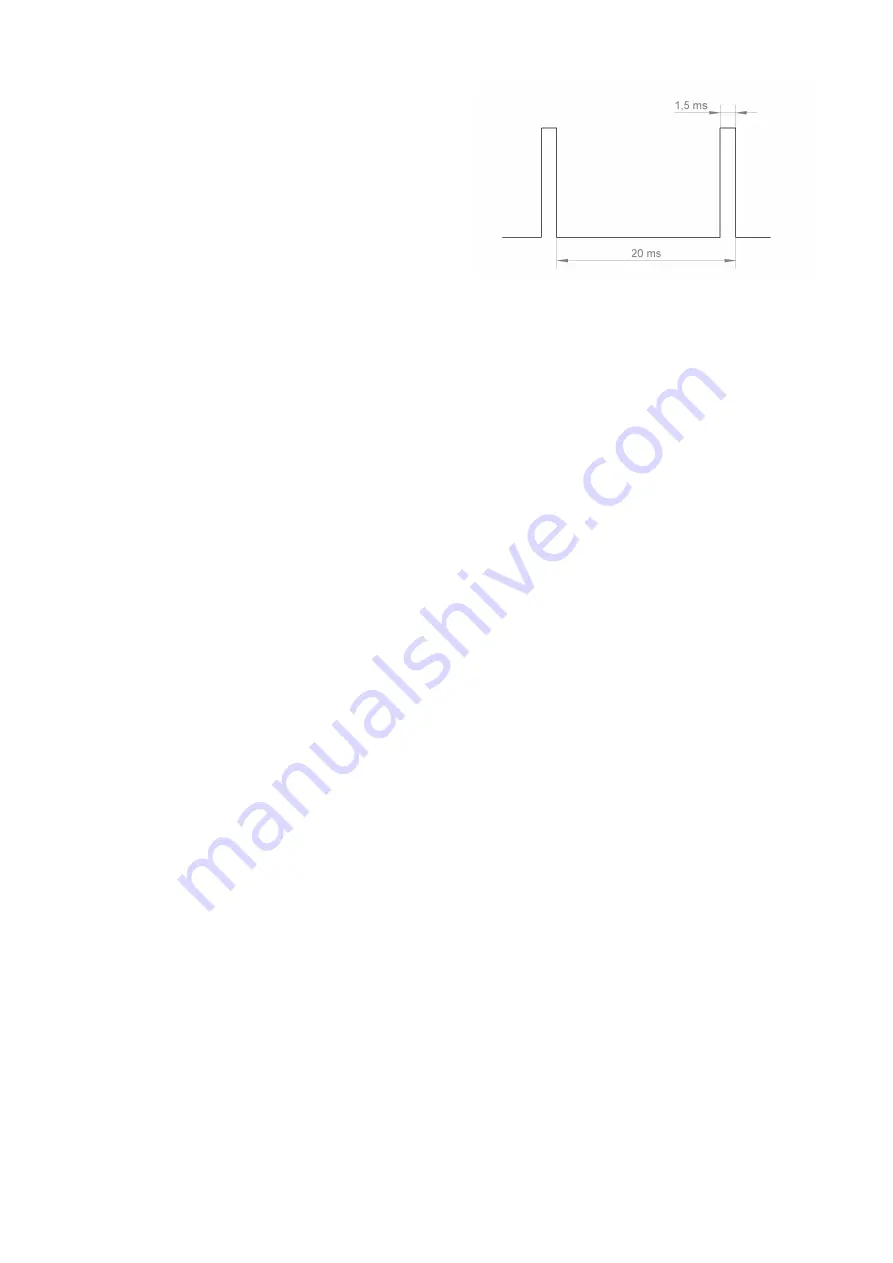
The graphic illustrates the pulse/pause ratio required to control a servo. In this case,
the pulse has a length of 1.5 ms = 1500 μs, which corresponds to the centre position
of the servo.
A servo receives as control signal a positive pulse with a pulse width between 500 μs
(0.5 ms) and 2500 μs (2.5 ms). The total period duration of the control signal is 20 ms.
When the servo is in the middle position, the pulse width is 1500 μs (1.5 ms).
If the pulse width is less than 1.5 ms, the servo rotates in one direction. If the pulse width is greater than 1.5 ms, it rotates in the other direction. The angle of
rotation is proportional to the pulse width, i.e. the longer or shorter the pulse, the more or less the servo rotates in the corresponding direction.
Figure 18
Summary of Contents for 1664151
Page 1: ...Operating Instructions Hexapod Robobug Complete Set Item no 1664151...
Page 23: ...23 The femur servo mount must be mounted a total of 6 times Figure 31 Figure 32...
Page 26: ...26 Figure 37...
Page 36: ...36 Figure 58 Figure 59...
Page 37: ...37 Figure 60 Illustration_61 Figure 61...
Page 38: ...38 Figure 62...
Page 66: ...66...
Page 67: ...67...







































































