





















6. Parameter Input
• DOK-CONTRL-DDC+MDD+DLC-ANW1-EN-E1,44 • 01.97
45
Input value: 0000 1000
KV Factor
Parameter A 1 0 3
Input range: 0.01 ... 30.00
Decimal places: 2
The KV factor is used to define positional amplification. The KV factor deter-
mines the maximum lag distance derived from the maximum speed.
KV = 1 equals a lag distance of 1 mm with a speed of 1 m/min
The KV factor must be adjusted to match the mechanical conditions.
A KV factor which is too small reduces drive dynamics.
A KV factor which is too big leads to drive instability.
Start with KV = 1.00 when determining the optimum value.
Feed Constant
Parameter A 1 0 8
Input range: 0.1000 ... 5000.0000 or 0.01000 ... 500.00000
Decimal places: 4 or 5 depending on parameter B 007
That path is set here which results from one rotation of the position encoder.
It can be input in any unit of measurement, e.g., mm, cm, inch, degrees and
so on. The unit set here is designated the input unit (EGE). All other units
must relate to this one.
Value for example 1, section 6.6
Input value: 0006,2500
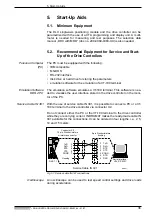
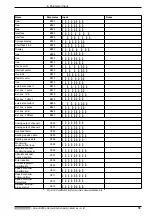
Working direction
Parameter A 1 0 9
Fig 6.4: Setting parameter A109
VK
h
=
Z
1
Z
2
-------
•
10mm
=
35
56
------
•
6.25mm
=
Clockwise rotational direction of
the
motor results in positive feed
FPpara
input value:
00000000
slide
X +
Counterclockwise rotational
direction of the motor results in
positive feed
input value
01000000
slide
X +







































































