
























6. Parameter Input
• DOK-CONTRL-DDC+MDD+DLC-ANW1-EN-E1,44 • 01.97
59
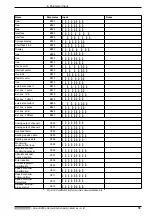
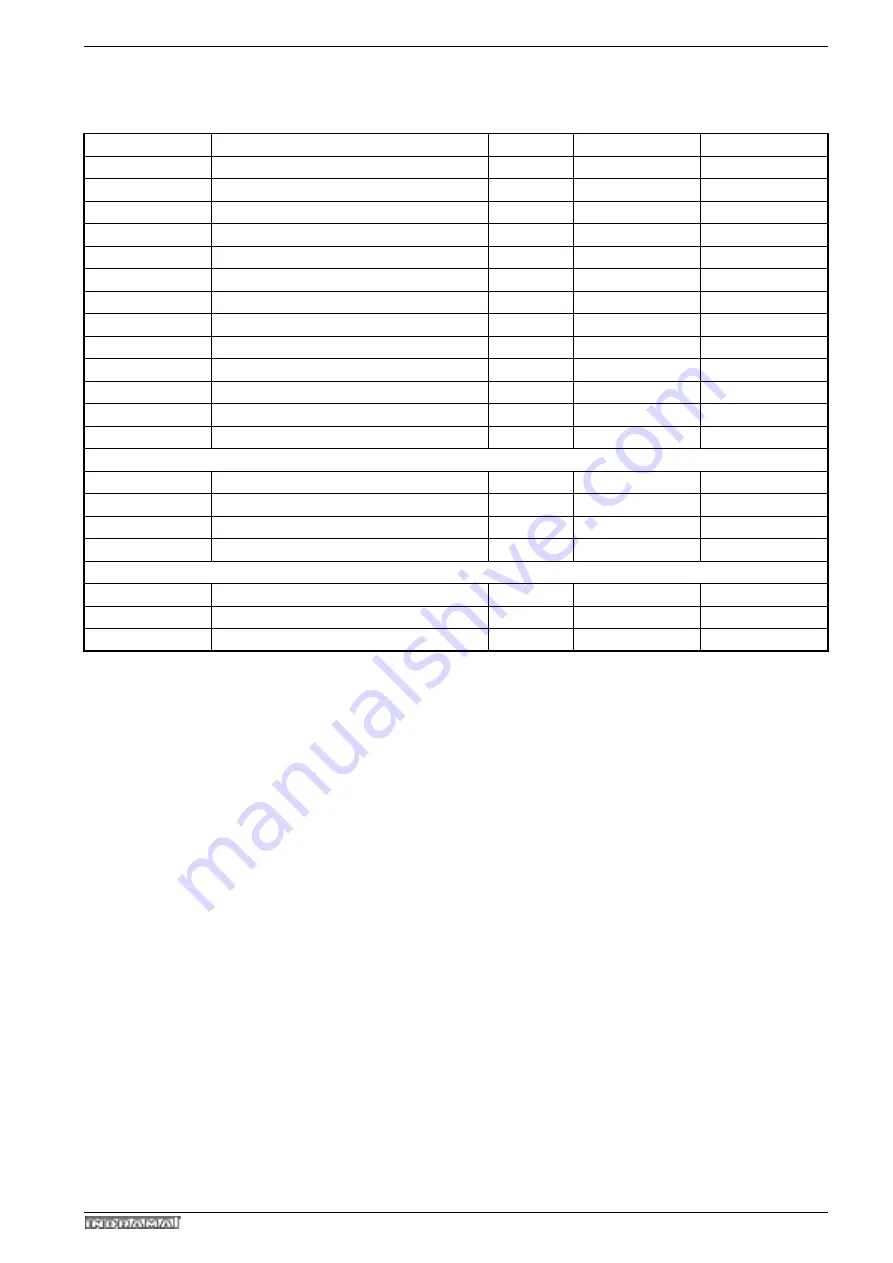
6.11. Parameter Input Limits
Fig 6.15: Parameter input limits
Parameter
Designation
Min. data
Max. data
A100
Maximum speed
EGE/sec
0 0 0 0 0 0 1 0
0 5 0 0 0 0 0 0
A101
Setup speed
EGE/sec
0 0 0 0 0 0 1 0
0 5 0 0 0 0 0 0
A102
Acceleration
EGE/sec
2
0 0 0 0 0 0 1 0
9 9 9 9 9 9 9 9
A103
KV factor
0 0 0 0 0 0 0 1
0 0 0 0 3 0 0 0
A106
Switching threshold
EGE
0 0 0 0 0 0 0 1
0 0 9 9 9 9 9 9
A108
Feed constant
EGE
0 0 0 0 1 0 0 0
5 0 0 0 0 0 0 0
A111
Zero offset
EGE
0 0 0 0 0 0 0 0
0 9 9 9 9 9 9 9
A113
Minimum traversing range limit
EGE
0 0 0 0 0 0 0 0
9 9 9 9 9 9 9 9
A114
Maximum traversing range limit
EGE
0 0 0 0 0 0 0 0
9 9 9 9 9 9 9 9
A116
Rotary table
0 0 0 0 0 0 0 1
0 0 0 0 9 9 9 9
A117
Break point
EGE/sec
2
0 0 0 0 0 0 0 1
0 0 9 9 9 9 9 9
A121
Drive sensitivity
0 0 0 1 0 0 0 0
9 9 9 9 0 0 0 0
A122
Position monitoring window
0 0 0 0 0 0 0 1
0 0 0 0 0 1 0 0
B017
external encoder 1 pulse
0 0 0 0 0 1 0 0
0 0 0 2 0 0 0 0
B018
external encoder 1 feed constant
EGE
0 0 0 0 1 0 0 0
5 0 0 0 0 0 0 0
B021
external encoder 2 pulse
0 0 0 0 0 1 0 0
0 0 0 2 0 0 0 0
B022
external encoder 2 feed constant
EGE
0 0 0 0 1 0 0 0
5 0 0 0 0 0 0 0
C002
Overload ...
0 0 0 0 0 0 0 0
0 0 0 0 0 4 0 0
C006
Absolute encoder - monitoring...
0 0 0 0 0 0 0 0
4 0 9 5 9 8 9 7
C007
Absolute encoder homing position
0 0 0 0 0 0 0 0
4 0 9 5 9 9 9 9







































































